
2026年4月26日四川04
1.多旋翼的GPS模式、姿态模式、纯手动模式有什么区别?
答:姿态模式:内回路参与工作,外回路不参与工作;
GPS模式:内外回路均参与工作;
纯手动模式:内外回路均不参与工作;
2.简述飞控系统的三大核心算法?
答:建模及惯性导航算法、PID算法、卡尔曼滤波算法;
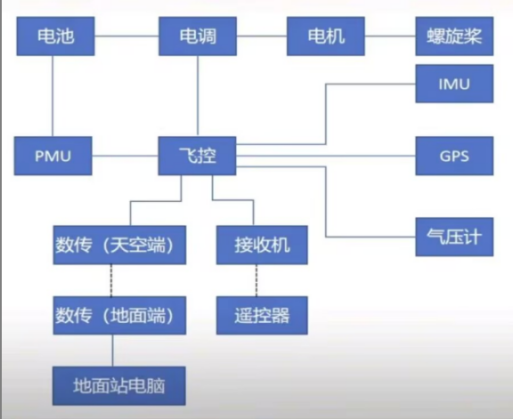
3.连线题,电池、电机、电调、PMU、桨叶、数传(天空端)、数传(地面端)、IMU、接收机、遥控器、磁罗盘、GPS、飞控、地面站电脑(用实线、虚线连接,全部连接)?
4.12S1P、40000mah电池、六旋翼无人机,单个电机的功率为592W,航时为多久?
答:航时=电池电量*续航时间÷无人机总功率,(3.7V×12)÷(592W×6)=0.5h=30min
5.无人机实现飞行控制的目标有哪些?四个步骤顺序?
答:预先准备、飞行前准备、飞行实施、飞行后讲评
2026年4月13日安徽02
1. 桨尖线速度公式
v=ωr
线速度u单位:米/秒(m/s);
角速度单位:弧度/秒(rad)
半径r单位:米(m);
2. 经纬度起点、范围、度分秒换算
起点
经度:0°经线(本初子午线,英国格林尼治)
纬度:0°纬线(赤道)
范围
经度:东经0°~180°、西经0°~180°(数学:-180°~+180°)
纬度:北纬0°~90°、南纬0°~90°(数学:-90°~+90°)
换算(60进制)
度分秒 → 十进制度
十进制 = 度 + 分/60 + 秒/3600
例:30°20′15″ = 30 + 20/60 + 15/3600 = 30.3375°
十进制度 → 度分秒
度 = 整数部分;
分 = (小数×60)的整数;
秒 = (分小数×60)
例:40.567° → 40°,0.567×60≈34.02′ → 34′,0.02×60≈1.2″ → 40°34′1.2″
3. 6S 300KV 与 3S 500KV 转速对比
转速(RPM)= 电池S数 × 3.7V × KV
① 6S 300KV:6×3.7×300 = 6660 RPM
② 3S 500KV:3×3.7×500 = 5550 RPM
结论:① 6S 300KV 转速更快
4.多旋翼视距内、超视距、教员飞行经历要求
视距内:总飞行时长≥44小时
带飞时长≥10小时
单飞时长≥5小时
模拟器练习时长≤22小时
超视距:总飞行时长≥56小时
带飞时长≥15小时
单飞时长≥5小时
地面站单飞时长≥1小时
地面站带飞时长≥3小时
模拟器练习时长≤28小时
教员:总飞行时长≥120小时
带飞时长≥15小时
单飞时长≥5小时
5. 定点转弯,协调转弯,自适应转弯区别
答:定点转弯:旋翼在悬停状态下转弯会精确通过每个GPS位置点。在每个位置点会减速,悬停,停留。停留时间可以设置。
协调转弯:飞行器的速度,油门基本不变旋翼会偏离GPS位置点,可能出现在航线拐弯的外侧。
自适应转弯:飞行速度、油门会随航线转弯而减速,旋翼会偏离GPS位置点,但不会出现在航线拐点的外侧





暂无评论内容