
2026年3月5日江苏03
1、飞控三大算法?
参考答案:捷联式惯性导航系统、PID算法、卡尔曼滤波算法。
2、理论缺考冷静期为多久?理论补考冷静期为多久?
参考答案:考试申请人有理论缺考记录的,再次申请任何考试日期与缺考日期间隔最少为28个日历日才可以报考下一次;理论挂科后需间隔最少为28个日历日才可以预约考试。
3、经纬度换算度分秒?
参考答案:换算关系:1°=60′;1′=60″;1°=3600″;
度换度分秒:①小数点前取度(°);
②小数点部分×60结果的小数点前取分(′);
③取完分后小数点部分×60结果为秒(″)。
度分秒换度:以X°Y′Z″为例=X°+(Y/60)°+(Z/3600)°;
注:可参考主页的度分秒转换视频。
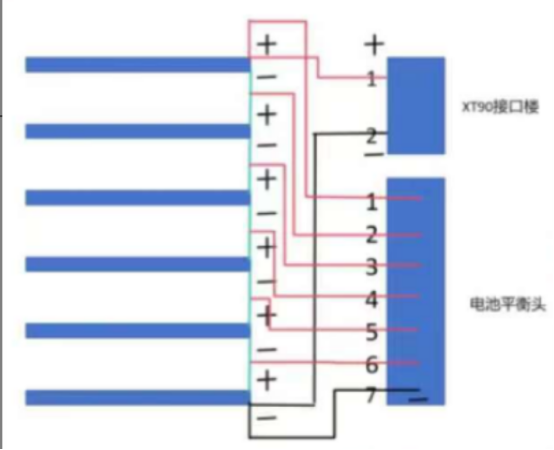
4、6S 10000MAH电池,单片电池容量为多少?理论状态下,满电电池总能量为多少?
参考答案:S表示串联,P表示并联
并联增容增流不增压、串联增压不增流不增容
单片电芯的容量是10000MAH
满电能量=满电电压×电池组容量=4.2V×6×10AH=252WH。
5、IMU、GCS、COMPASS的含义分别是多少?
参考答案:IMU——惯性测量单元
COMPASS——磁罗盘;
GCS——地面控制站。
2025年12月10日湖北04
1、民用航空常用链路有哪些?使用的什么天线?什么方式架设?
答:遥控器上行:全向天线,与通讯方向垂直;
图传下行:2km(全向天线),与通讯方向垂直;
10km(定向天线),与通讯方向相同;
数传上下行:2km(全向天线),与通讯方向垂直;
10km(定向天线),与通讯方向相同;
2、GPS和气压计高度相差 100米,是什么原因?
答:GPS高度和气压高度之间的差异是由多种因素引起的,包括气压变化、温度影响、GPS基准误差以及大气稳定和其他误差。
3、20000mah6s 四旋翼每臂 10A 多长时间放电完?剩余40%的电,用2c的充电倍率多长时间能充满??
答:放电时长=电池组容量÷电流=20Ah÷(4×10A)=0.5h=30min;
充电时长=需充电电池容量÷充电电流=[20Ah×(1-40%)]÷(20Ah×2C)=0.3h=18min;
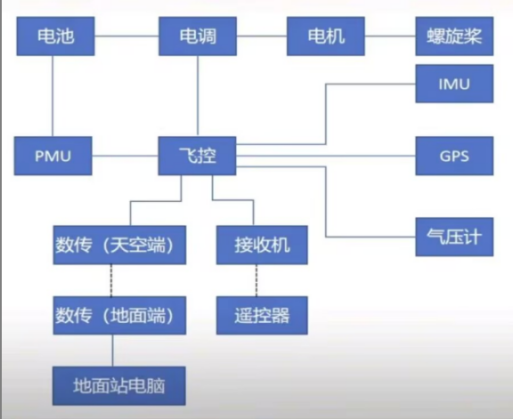
4、电池、电调、电机、 PMU、IMU、空速计、GPS、接收机、飞控、气压计一共十个组件连线?
(配图连线关系:
电池→PMU;PMU→飞控;
飞控→电调;电调→电机;
飞控→IMU;飞控→气压计;
飞控→GPS;飞控→接收机)
5.什么是模拟量什么是开关量?
答:模拟控制量:杆、纽等连续的是模拟控制量;
作用:模拟用来控制操作姿态、舵面或设备连续动作;
开关控制量:拨动的是开关控制量;
作用:开关用来控制模式开关、开伞、一键返航舵等;
2026年2月6日广东03
1.5块4S1000MAH放电倍率100C充电倍率2C的锂聚合物电池,在串联和并联情况下,最大放电电流分别是多少?满电电压分别是多少?
参考答案:并联增容增流不增压、串联增压不增流不增容
串联:
最大放电电流=电池组容量×放电倍率=1AH×100C=100A
满电电压=单片电芯的满电电压×电池串联数=4.2V×4×5=84V
并联:最大放电电流=电池组容量×放电倍率=1AH×5×100C=500A
满电电压=单片电芯的满电电压×电池串联数=4.2V×4=16.8V。
2、以考试记性为例,写出测速度的传感器?测高度的传感器?
参考答案:以多旋翼为例:
速度传感器:GPS;
高度传感器:气压传感器。
3、数传下行链路丢失的后果?怎么应急处理?
参考答案:地面站软件上的飞行状态和数据不再更新;
尝试重新连接下行链路;无人机在视距内应尽快遥控着陆;
在视距外,先发送返航指令,等待飞机返航;个别情况下,可以依靠任务设备图像返航。
4、BEC、ESC、AIL、COMPASS、GCS中文名称?
参考答案:BEC——免电池电路
AIL——副翼;
ESC——电子调速器;
COMPASS——磁罗盘;
GCS——地面控制站。
5、当前所处位置6.5℃,上升1000米多少℃?
参考答案:在对流层内,气温递减率为0.65℃/100米;
6.5℃-1000米×0.65℃/100米=6.5℃-6.5℃=0℃。
2025年11月5日江苏03
![图片[1]-陆晓娟口试真题-更炽热无人机CAAC执照备考](https://caac.hotteruav.cn/wp-content/uploads/2026/04/image-7.png)
2025年11月21日山西01
1、升力公式及各字母的含义?
答:L = 1/2 ρ v² s CL;
– L:升力;
– 1/2:常数;
– ρ:空气密度;
– V:飞机相对于气流的速度,即空速;对于固定翼飞机指的是真空速,对于旋翼机,指的是桨叶的线速度;线速度 = 角速度 × 桨叶半径;
– S:升力面积;对于固定翼飞机指的是机翼垂直投影面积;对于旋翼机指的是旋翼面积;
– CL:升力系数,跟旋翼和迎角的大小有关;
(如考固定翼只写写固定翼;如考多旋翼只写写多旋翼,如考垂起固定翼既要写固定翼也要写多旋翼)
2、多旋翼和直升机螺旋桨的是什么桨?
答:多旋翼使用的是定距螺旋桨;
直升机使用的是变距螺旋桨;
3、PID各字母的含义?
答:- P:比例;飞控修正补偿的频率。决定飞机倾斜多大角度飞控开始修正,P越高飞控在越小的倾斜角度开始修正,修正次数增加。
– I:积分;飞控修正补偿的强度。决定飞控修正到位的快慢,i越高修正到位越快。
– D:微分;飞控修正补偿的幅度。决定飞控修正的角度大小。
4、PMU、IMU、GPS、电调、电机、电池、飞控、LED灯、空速管、接收机、数传电台(垂起、多旋翼根据自己所考机型完成作答)?
答:
电池 ──┬── 电调 ── 电机
│
└── PMU ──┐
│
飞控 ────┬───────┘
│
├── IMU
├── 数传
├── GPS
├── 接收机
└── LED灯
5、遥控器开关量和模拟量是什么?
答:- 模拟控制量:杆、纽等连续的是模拟控制量;
作用:模拟用来控制操作姿态、舵面或设备连续动作;
– 开关控制量:拨动的是开关控制量;
作用:开关用来控制模式开关、开伞、一键返航等;





暂无评论内容