
2026年4月23日新疆01
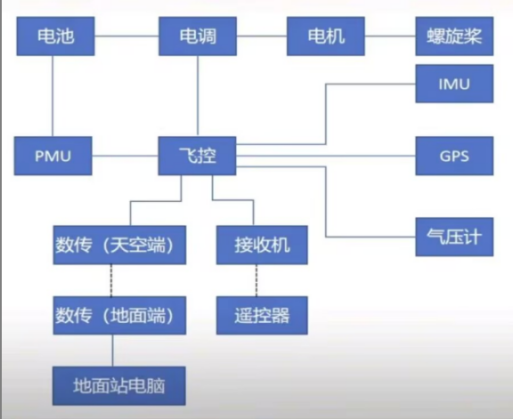
1.多旋翼无人机的动力系统由哪几部分组成?描述一下你参加教员飞行考试时使用的设备动力系统的参数?
答:动力电池-电子调速器-动力电机-螺旋桨;
电池:65 22000mAh 2P,放电倍率15C,续航10-15分钟;
电机:60-80A 12S,支持FOC控制,带过流/过热保护;
电机:8120/100KV(12S)、X8系列,单轴额定拉力4-6kg,功率800-1200W/轴;
螺旋桨:3011,2叶碳纤维;
2.请将下列经纬度换算成十进制,结果精确到小数点后四位:N37°41’16” E115°34’31″?
答:坐标转换十进制法:十进制数 = 度 + 分 ÷ 60 + 秒 ÷ 3600;十进制经纬度转换公式:先取整数部分为度,小数部分×60的整数为分,剩余小数×60为秒
N37°41’16” = 37 + 41 ÷ 60 + 16 ÷ 3600 = N37.6878°
E115°34’31” = 115 + 34 ÷ 60 + 31 ÷ 3600 = E115.5753°
3.cw和波1555的含义?
答:cw是反波,1555代表波长15英寸,螺距5.5英寸。
1英寸=2.54cm
4.螺旋桨产生升力的原理,并解释原理?
答:牛顿第三定律:
定体内容:两个物体之间的作用力与反作用力,总是大小相等、方向相反,且作用在同一条直线上。
伯努利定理:
在理想流体(空气)的定常流动中,流体流速越快的位置,静压越小;流速越慢的位置,静压越大,总能量保持不变。
5.5000mah 65 5C 20C 求充电电流,放电电流,存储电压,截止电压,满电电压?
答:充电电流:电池容量5000mAh÷5A,充电倍率5C,充电电流=5A×5=25A;
放电电流:放电倍率20C,放电电流=5A×20=100A;
存储电压:锂电单节存储电压3.85V,65串联总存储电压=3.85V×65=25.35V;
截止电压:锂电单节截止电压3.0V,65串联总截止电压=3.0V×65=195V;
满电电压:锂电单节满电电压4.2V,65串联总满电电压=4.2V×65=275V。
2026年4月22日山西01
1.多旋翼无人机的动力系统由哪几部分组成?描述一下你参加教员飞行考试时使用的设备动力系统的参数?
答:动力电池-电子调速器-动力电机-螺旋桨;
电池:65 22000mAh 2P,放电倍率15C,续航10-15分钟;
电机:60-80A 12S,支持FOC控制,带过流/过热保护;
电机:8120/100KV(12S)、X8系列,单轴额定拉力4-6kg,功率800-1200W/轴;
螺旋桨:3011,2叶碳纤维;
2.请将下列经纬度换算成十进制,结果精确到小数点后四位:N37°41’16” E115°34’31″?
答:坐标分秒十进制度:十进制度 = 度 + 分 + 秒 ÷ 3600;十进制度转角度分秒:先取整数部分为度,小数部分×60的整数为分,剩余小数×60为秒
N37°41’16” = 37 + 41 ÷ 60 + 16 × 3600 = N37.6878°
E115°34’31” = 115 + 34 ÷ 60 + 31 × 3600 = E115.5753°
3.cw和波1555的含义?
答:cw是反波,1555代表波长15英寸,螺距5.5英寸。
1英寸=2.54cm
4.螺旋桨产生升力的原理,并解释原理?
答:牛顿第三定律:
定体静力:两个物体之间的作用力与反作用力,总是大小相等、方向相反,且作用在同一条直线上。
伯努利定理:
在理想流体(空气)的定常流动中,流体流速越快的位置,静压越小;流速越慢的位置,静压越大,总能量保持不变。
5.5000mah 6S 5C 20C 充电电流,放电电流,存储电压,截止电压,满电电压?
答:充电电流:电池容量5000mAh=5A,充电倍率5C,充电电流=5A×5=25A;
放电电流:放电倍率20C,放电电流=5A×20=100A;
存储电压:锂电池存储电压3.85V,6S串联总存储电压=3.85V×6=23.1V;
截止电压:锂电池存储电压3.0V,6S串联截止电压=3.0V×6=18.0V;
满电电压:锂电池存储电压4.2V,6S串联满电电压=4.2V×6=25.2V。
2026年3月21日山西01
1. 飞控接口TELEM1一般通常下连接什么外置设备?接口定义为5V、TX、RX、GND,如何连接外置设备的5V TX RX GND,请正确连线?
– 连线方式:5V→5V,TX→RX,RX→TX,GND→GND
– 飞控接口TELEM1通常情况下连接数传或遥测
2. 以大疆无人机(T70)为例,什么是倾角,倾角的作用是什么,从无人机中心点向外看去CCW电机向哪个方向倾斜?
答:倾角:电机绕着机臂的轴产生一定的角度;
作用:抵消偏航力矩,优化姿态响应速度,增加航向响应速率。
从无人机中心点向外看去CCW电机向右倾斜;
3. 四大阻力及减少四大阻力的办法?
答:飞机在低速飞行时主要受到摩擦阻力、压差阻力、干扰阻力和诱导阻力;
– 摩擦阻力:增加机身表面光洁程度;
– 压差阻力:改变优化机身外形,趋近于流线型;
– 干扰阻力:整流包皮;
– 诱导阻力:增大展弦比,使用翼稍小翼;
4. 画一个简易电调并连接起来,80A,6S~12S,BEC5V 解释电调上这些参数
– 连接示意图:
– 电池 → 电子调速器(ESC):红线接正极,黑线接负极
– 电子调速器 → 电机:提供三项交流电,任意调换其中两根可改变电机转向
– 电子调速器 → 飞控:PWM控制信号线、BEC5V输出、地线
– 参数含义:
– 80A:表示电调持续、稳定工作的电流为80A;
– 6-12S:表示电调可以使用由6-12节电芯串联组成的锂聚合物电池,对应的电压范围通常22.2V-50.4V(1S-3.7V/4.2V);
– BEC5V:表示该电调具备内置的免电池电路(BEC)功能,能够将输入的电池电压转换为稳定的5V直流电;
5. 6S10000mah 四旋翼无人机,单个电机功率504W 求电池最大倍率(电池电压统一4.2V计算)
答:最大放电倍率=最大功率÷满电能量
=(504W×4)÷(25.2V×10Ah)=8C;
2026年3月6日河南02
1. 无人机超视距考核标准,360度自旋的水平偏差(不超过±2米)。垂直偏差(不超过±1米)完成时间(5至30秒内)。8字飞行的水平偏差(不超过±2米),垂直偏差(不超过±1米),航向角偏差(±30度以内);
2. 6s2p16000mah 的电池 25C5C,飞行 10 分钟,剩余 20%的电,八旋翼求单个电机的平均电流:
16000mAh=16Ah(这里默认不是单片,不×2P,如果是单片要×2P)
总电流=耗电容量÷耗电时间=16Ah × (1-20%) ÷ (10/60)h=76.8A
单个电机平均电流=总电流÷8=76.8A÷8=9.6A
3. 某电调 150A,3s-6s,BEC5.0-8.4v/10A,HV,LIPO 解释含义?(押中)
150A:表示该电调的最大持续输出电流为 150A。
3S-6S:表示电调适用于3节到6节锂聚合物电池串联供电。电压为22.2V-50.4V。
LiPo:适用于锂电池(Lipo)供电的设备。
BEC 5.0-8.4V/10A:具备内置免电池电路功能,将动力电池的高压转换为(5.0V-8.4V)的稳定低压输出,最大输出电流为10A。
HV:支持高压(High Voltage)锂电池。单节满电4.35V/节。
4. 6S 10000mAh 电池,电机 KV 值为 400KV,螺旋桨直径 40cm,桨尖线速度为()m/s?(押中)
核心公式为:v=ωr=2πnr=πd(直径)n′
其中:ω:角速度(rad/s),r:半径(m),d:直径(m),n:每秒转速(r/s);40cm=0.4m
电机转速n=电池串数S×标称电压(V)×电机KV值=6S×3.7V×400KV=8880r/min
8880r/min=8880÷60=148r/s;V=πd(直径)n=π(取3.14)×0.4m×148r/s=185.888m/s
5. 解释相对,海拔,真实高度的含义并举出一个传感器?(押中)
海拔高度:以平均海平面为基准面,无人机到海平面的垂直距离。
用GPS测量。
真实高度:以无人机正下方地面为基准面,无人机相对于正下方地面的实际垂直高度。
用超声波传感器测量。
相对高度:以无人机起飞点(本场起降点)的地面为基准面,无人机到起飞点地面的垂直距离
用气压传感器测量。
(普遍网上的资料。至于有那么一场考试考官给的答案是GPS不能测海拔高度,具体能不能自行判断)
2026年2月6日山西03
1. 超视距考试慢速水平偏转360°水平位移误差不超过(±2)米,垂直位移误差不超过(±1)米,项目考核时间为(5-30)秒内;水平8字考试速度偏差(0.3-3m/s),水平位移误差不超过(±2)米,航向误差是(±30°)。
2. 6S2P 16000mAh电池,25C 5C,飞行10分钟,用了20%的电,八旋翼求单个电机的平均电流?
总放电电量:16000mAh × 20% = 3200mAh = 3.2Ah
总放电电流:3.2Ah ÷ (10/60)h = 19.2A
单个电机电流:19.2A ÷ 8 = 2.4A
3. 某电调160A、Lipo,3s-6s,BEC,HV,4.2-5.8v/10A,Lipo解释含义?
160A Lipo:“160A”表示电调持续稳定工作的最大电流为160A,瞬时峰值电流通常可达200A左右,适用于锂电池(Lipo)供电的设备。
3-6S:表示电调适用于3节到6节锂聚合物电池串联供电。
BEC4.2-5.8V/10A:具备内置降压供电电路功能,输出电压可调(4.2-5.8V),最大输出电流10A,为接收机与舵机供电。
HV:支持高压(High Voltage),兼容高压舵机(5.8V)与高压锂电池(单节满电4.35V)
4. 6S 10000mAh电池,电机KV值:400 KV,螺旋桨直径40cm,桨尖线速度为( )m/s?
计算电机转速:
6S电池标称电压为22.2
N = KV × U = 400 × 22.2 = 8880RPM
转换为每秒转速: 8880 ÷ 60 = 148 r/s
计算桨尖线速度:
螺旋桨直径 D = 40cm = 0.4m
V = πD n = π× 0.4 × 148 ≈ 185.98m/s
5. 解释海拔高度、真实高度、相对高度?它们用什么传感器测量?
气压传感器→海拔高度
GPS/气压传感器→相对高度
毫米雷达波→真实高度
红外传感器→真实高度
超声波传感器→真实高度
![图片[1]-谭磊口试真题-更炽热无人机CAAC执照备考](https://caac.hotteruav.cn/wp-content/uploads/2026/04/image-13.png)
![图片[2]-谭磊口试真题-更炽热无人机CAAC执照备考](https://caac.hotteruav.cn/wp-content/uploads/2026/04/image-14.png)
2025年12月23日新疆01
1: 飞机有哪四个阻力?怎么减小这些阻力?(必背题)
答:
①. 诱导阻力:增大展弦比,增加翼梢小翼
②. 摩擦阻力:增加表面光滑度
③. 压差阻力:流线型设计
④. 干扰阻力:整流包皮
2: 滚转绕()轴运动 俯仰绕()轴运动
偏航绕()轴运动 油门沿()轴运动?
(高频基础题)
答:
滚转绕(纵)轴运动 俯仰绕(横)轴运动
偏航绕(立)轴运动 油门沿(立)轴运动
3: Y三轴飞机可以起飞吗?如何实现?(常规题)
答:可以起飞
①. Y轴飞机每组由上下两个旋翼组成,以平衡反扭矩。
②. Y轴会增加一个舵机来抵消不对称的反扭矩。
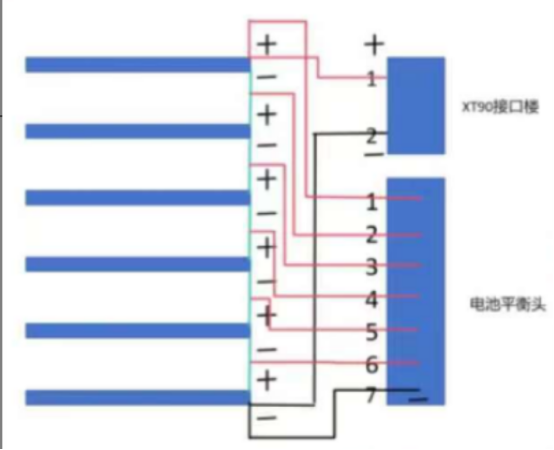
4: 电池连线?(新题)
答:
![图片[3]-谭磊口试真题-更炽热无人机CAAC执照备考](https://caac.hotteruav.cn/wp-content/uploads/2026/04/image-15.png)
12S飞机连接端
连线思路:首先将两块6S的电池进行串联,再将串联后的电池和12S电池进行并联
5: 简述无人机内外回路在各种模式是否参与工作?(高频基础题)
答:①. GPS模式:无人机内外回路均参与工作
②. 姿态模式:无人机内回路参与工作,外回路没有参与工作
③. 手动模式:无人机内外回路均没有参与工作
2025年11月25日河北04
1、2212对于电机和螺旋桨分别的含义,单位?
答:电机:22:代表电机定子线圈的直径是22mm;
12:代表电机定子线圈的高度是12mm;
螺旋桨:22:代表螺旋桨的直径是22英寸;
12:代表螺旋桨的螺距是12英寸;
1英寸=2.54cm;
2、超视距机长8字水平,垂直,角度误差?
答:水平误差不超过±2m;
高度误差不超过±1m;
航向角误差不超过30°;
3.在各种模式下,内外回路工作情况;
答:(舵面遥控(纯手动))模式:内外回路均不参与工作;
姿态遥控模式:内回路参与工作,外回路不参与工作;
人工修正(即GPS模式):内外回路均参与工作;
4、连线题?
答:略;
5、无人机,俯仰运动绕哪个轴运动,滚转绕哪个轴运动,偏航绕哪个轴运动,加收油门沿哪个轴运动?
答:俯仰是绕横轴运动;
滚转是绕纵轴运动;
偏航是绕立轴运动;
加收油门沿立轴运动;
2025年11月25日河北04
1. 遥控器发射机是什么天线?使用前应注意什么?
答:遥控器发射机常用全向鞭状天线。
使用前应注意架设及布置方式要与通信方向垂直;先展开天线再开机,避免发射模块因信号反射过热损坏;检查天线无弯折、断裂,确保信号传输稳定;远离金属遮挡物,避免信号被屏蔽。
2. 美国手遥控器四个通道的控制运动
答:通道1(CH1):副翼(AIL),右手控制遥感左右移动,控制飞机沿横轴左右移动,绕纵轴横滚(Roll);
通道2(CH2):升降(ELE),右手控制遥感上下移动,控制飞机沿纵轴前后移动,绕横轴俯仰(Pitch);
通道3(CH3):油门(THR),左手控制遥感上下移动,控制飞机沿立轴上下移动,控制飞机高度(Height);
通道4(CH4):方向(RUD),左手控制遥感左右移动,控制飞机绕立轴左右旋转,控制飞机方向(Direction);
3. 理论成绩有效期(不超过24个日历月);
实践成绩有效期(不超过60个日历日);
理论补考间隔(不少于28个日历日);
实践补考间隔(不少于14个日历日);
实践考试从(首个项目综合问答)通过后开始计算;
4. 电池连接方式(6S电池组成12S供电)
(示意图逻辑:两个6S电池通过串联方式组成12S电池,正极与正极、负极与负极对应串联)
5. 遥控器调节无刷电调油门行程的方法
答:A:将电调信号线直接接入接收机的油门通道(通常为第三通道),确保电调电源线与电池连接端断开;
B:遥控器开机,将油门摇杆推至最大位置,连接电池给电调上电,此时电调会发出音乐声+2声哔音,表示成功捕获最大油门值;
C:在1声哔音后,立即将油门摇杆拉至最小位置,电调会先发出电池节数对应的哔音,随后1声长音表示最小油门捕获成功,校准完成;
D:断开电池,重新上电并缓慢推动油门,电机应平稳启动。其余电调重复上述步骤,逐个校准;
2025年11月27日北京02
1. 遥控器发射机是什么天线?使用前应注意什么?
答:遥控器发射机常用全向鞭状天线。
使用前应注意架设及布置方式要与通信方向垂直;先展开天线再开机,避免发射模块因信号反射过热损坏;检查天线无弯折、断裂,确保信号传输稳定;远离金属遮挡物,避免信号被屏蔽。
2. 美国手遥控器四个通道的控制运动
答:通道1(CH1):副翼(AIL),右手控制遥感左右移动,控制飞机沿横轴左右移动,绕纵轴横滚(Roll);
通道2(CH2):升降(ELE),右手控制遥感上下移动,控制飞机沿纵轴前后移动,绕横轴俯仰(Pitch);
通道3(CH3):油门(THR),左手控制遥感上下移动,控制飞机沿立轴上下移动,控制飞机高度(Height);
通道4(CH4):方向(RUD),左手控制遥感左右移动,控制飞机绕立轴左右旋转,控制飞机方向(Direction);
3.理论成绩有效期(不超过24个日历月);
实践成绩有效期(不超过60个日历日);
理论补考间隔(不少于28个日历日);
实践补考间隔(不少于14个日历日);
实践考试从(首个项目综合问答)通过后开始计算
4、无人机有哪几条链路?分别是什么?中断会什么?
答:无人机有3条链路分别是:
遥控器上行链路;
图传下行链路;
数传上下行链路;
遥控器上行链路中断会导致无法向无人机发送控制指令;
图传下行链路中断会导致无人机航拍图图像丢失;
数传上行链路中断,无法在线重规划航线航点及发送任务指令等。
数传下行链路中断,地面站软件上的飞行状态和数据不再更新。
5、6S 10000mah电池,最大放电20C,最大充电2C,问能不能带上飞机?
答:额定能量=电池组额定电压 × 电池组容量
=(6×3.7V)×10Ah=222Wh
不能带上飞机,因为民航规定严禁携带额定能量超过160Wh;





暂无评论内容