

2026年5月6日山西03
1.CCAR-92部中什么类型需要申请适航证?
答:中型、大型民用无人驾驶航空器系统
2.锂离子电池22000mah,22.2V,放电倍率25C,充电倍率5C,飞行放点至30%截止,以11A充电,求理论充电时间为多少分钟?
答:充电时间=所充容量÷充电电流 = [22Ah×(1-30%)]÷11A = 1.4h = 84min
3.旋翼力有哪些?(至少写三个)
答:旋翼力有:压差阻力、摩擦阻力、干扰阻力。
4.GNSS、compass、IMU、ESC中文名称?
答:GNSS:全球导航卫星系统;COMPASS:磁罗盘;IMU:惯性测量单元;ESC:电子调速器
5.对流层内,气温随标准大气压升高而(升高),气压随高度的升高而(减小)。
2026年4月28日山东01
1、CW与CCW的区别,某轻型无人机螺旋桨型号标注为9060代表什么含义?
答:CW/R-反桨,代表在俯视状态下螺旋桨顺时针旋转;
CCW-正桨,代表在俯视状态下螺旋桨逆时针旋转;
9060螺旋桨:90度表示螺旋桨直径是9.0英寸;60度表示螺旋桨螺距是6.0英寸;
1英寸=2.54厘米=25.4毫米
2、数字飞行器丢失的后果,怎么应急处理?
答:无人机的飞行器将地面站软件上的飞行状态和数据不再更新。
①首先尝试重新连接飞行器;
②无人机在机舱内应尽快检查电池;
③无人机在机舱外应避免接触金属;
④个别情况下,可依靠任务设备图像返航。
3、计算题
4、填空题
根据考试管理办法中规定无人机在进行模拟位置姿态应急返航实践考试,明确允许的返航角度误差为不超过±45°;需要用姿态模式进行返航;执照申请人理论考试成绩通过后有效期不超过24个月。理论考试未通过申请补考间隔日期为不少于28个日历日;综合问答考试通过后成绩有效期为不超过60个日历日;综合问答未通过申请补考的间隔日期为不少于14个日历日;实践飞行考试未通过申请补考的间隔日期为不少于14个日历日。
5、飞控接口VCC、GND、RX、TX分别代表什么含义?
答:
VCC:电源正极
GND:电源负极
RX:接收端
TX:发送端
2026年4月22日山东01
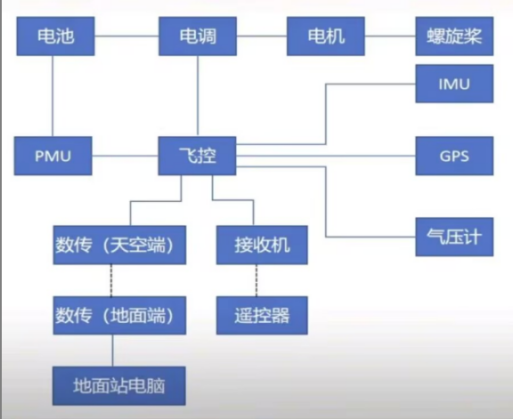
1.动力系统组成部分?作用分别是什么?
答:
电池:动力电源,为无人机提供电能
电机:改变电机的转速、直流电转交流电、降压稳压、BEC输出、过热保护、刹车、接受和反馈飞控信号。
螺旋桨:将电能转化为机械能,带动桨叶旋转,从而为无人机提供升力来源。
螺旋桨:螺旋桨旋转,为无人机提供升力。
2.VCC GND RX TX 分别代表什么含义?
答:
VCC:电源正极(供电端)提供电路工作所需电压
GND:电源负极(接地端)形成电流回路
RX:发送端(Transmit),用于串行通信的输出信号,来自当前设备的发送引脚,连接到对方的接收引脚(RX)。
TX:接收端(Receive),用于串行通信的输入信号,来自当前设备的接收引脚,连接到对方的发送引脚(TX)。
3.多旋翼考试中,理论考试、实践考试或考核内容,需要间隔多长时间才能再次考试?
答:理论考试通过间隔时间:28个日历日。
实践考试通过间隔时间:14个日历日。
4.螺旋桨型号标注为 9060 代表的含义?应急返航航向角误差多少?用什么模式?
答:
螺距6英寸。1英寸=2.54cm;
航向角误差:45°;
姿态模式:
5.一块 SS 2000mah 40C 2C 电池,求电池组满电电压,最大放电电流和标称能量分别是多少?
答:
电池电压:5s×4.2=21V
最大放电电流:2ah×40C=80A
标称能量:3.7V×5s×2Ah=37Wh
2026年3月21日广东01
1. 飞控接口TELEM1一般通常下连接什么外置设备?接口定义为5V、TX、RX、GND,如何连接外置设备的5V TX RX GND,请正确连线;
(连线图:5V-5V,TX-RX,RX-TX,GND-GND)
飞控接口TELEM1通常情况下连接数传或遥测
2. 适飞空域高度是多少米?小型中型有没有适飞空域?
答:适飞空域真高不超过120米;
适飞空域:管制空域以外的空域为微型、轻型、小型无人驾驶航空器的适飞空域;
所以,小型无人驾驶航空器有适飞空域;
中型无人驾驶航空器没有适飞空域
3. 轴距是什么?表现飞机的什么特征?
答:无人机的轴距:是指多旋翼无人机中对角线上的两个电机轴心之间的距离。
通常以毫米为单位,它直接影响无人机的螺旋桨尺寸和载重能力。
4. 6s1p 16000mah 25C 5C电池,无人机能够飞行15分钟,八旋翼单个电机的平均电流是多少?
答:耗电总电流=电池组容量÷飞行时间=16Ah÷(15÷60)h=64A
单个电机的平均电流=耗电总电流÷旋翼数=64A÷8=8A
5. 解释相对,海拔,真实高度的含义并举例出一个传感器?
答:海拔高度:也叫绝对高度,即飞机飞行水平面到海平面(大地水准面)的垂直距离:使用GPS测量;
真实高度:是指飞机距离正下方地面的实际垂直高度;使用激光测距传感器、超声波传感器等测量;
相对高度:是指飞机到指定的水平面的垂直距离;使用气压传感器测量;
2026年3月21日广东01
1. 飞机机体激荡厉害,只调一个参数,调什么?
答:减小P;
2. 转速1000r/min,螺旋桨直径0.36m,求桨尖线速度为m/s?
答:线速度=角速度×半径=2πn×r=2×3.14×1000转/60S×0.18m=18.84m/s;
3. X型气动布局四抽四旋翼无人机,俯视右上角螺旋桨为CCW无人机姿态做下列改变时,请标出各旋翼的加减速变化(加速请填“+”,减速请填“−”,本题1分,错填漏填不得分)?
美国手 左上桨叶 右上桨叶 左下桨叶 右下桨叶
后仰 − − + +
右滚转 + − + −
左偏航 + − − +
右偏航 − + + −
4. 民用无人驾驶航空器未经实名登记实施飞行活动的,由(公安机关)责令改正,可以处(200元以下)的罚款;情节严重的,处(2000元以上2万元以下)的罚款。涉及境外飞行的民用无人驾驶航空器未依法进行国籍登记的,由(民用航空管理部门)责令改正,处(1万元以上10万元以下)罚款?
5.(多选)多旋翼无人机使用遥控器不能解锁造成的原因有哪些?(C、D、E、F)
A 电机转向不正确
B 桨叶安装不正确
C 油门通道设置不正确
D 指南针未校准
E 遥控器未校准
F IMU未校准
2026年2月6日广东03
1. 5块4S 1000mAh 100C 2C,求串联、并联的最大放电电流和满电电压?
– 1000mAh = 1Ah
– 串联(串联增压):
– 最大放电电流 = 1Ah × 100C = 100A
– 满电电压 = 4S × 4.2V × 5 = 84V
– 并联(并联增流):
– 最大放电电流 = 1Ah × 100C × 5 = 500A
– 满电电压 = 4S × 4.2V = 16.8V
2. 以考试机型为例,写出测速度的传感器,测高度的传感器?
– 测速度的传感器:GPS、IMU、光流传感器、多普勒雷达
– 测高度的传感器:GPS(测海拔高度)、气压高度计(测相对高度)、红外传感器、激光雷达、超声波高度计(测真实高度)
3. 数传下行链路丢失的后果,怎么应急处理?
– 后果:地面站软件上的飞行状态和数据不再更新。
– 处理:无人机在视距内应尽快遥控着陆;视距外,先发送返航指令,安心等待返航;个别情况下,可倚靠任务设备图像返航。
4. BEC、ESC、AIL、COMPASS、GCS中文名称?
– BEC:免电池电路
– ESC:电子调速器
– AIL:副翼
– COMPASS:指南针/磁罗盘
– GCS:地面控制站
5. 当前所处位置6.5℃,上升1000米多少℃?
– 对流层内,高度每上升100米,温度下降0.65℃。
– 计算:6.5℃ – (1000/100) × 0.65℃ = 6.5℃ – 6.5℃ = 0℃





暂无评论内容