

2026年4月10日湖北04
1.电池耗电量求八个旋翼的平均电流,6slp 16000mah最大放电25C充电5C 使用15分钟后降落,电池只剩20%,求八旋翼单个电机平均放电电流?
![图片[1]-王文滨口试真题-更炽热无人机CAAC执照备考](https://caac.hotteruav.cn/wp-content/uploads/2026/04/image-48-1024x141.png)
2.某电调上标有 80A,6s-12s,Lipo,BEC,5.0-8.4V/10A,HV 字样的含义分别是什么?
(漏写,错写,多写不得分。)
80A:表示该电调的最大持续输出电流为 80A。
6s-12s:表示电调适用于6节到 12节锂聚合物电池串联供电。
LiPo:适用于锂电池(Lipo)供电的设备。
BEC 5.0-8.4V/10A:具备内置免电池电路功能,将动力电池的高压转换为(5.0V-8.4V)的稳定低压输出,最大输出电流为 10A。
HV:支持高压(High Voltage)锂电池。单节满电 4.35V/节。
3.x型的螺旋桨加减速
美国手 左上桨叶 右上桨叶 左下桨叶 右下桨叶
后仰 + + – –
右滚转 + – + –
左偏航 + – – –
右偏航 – + + +
4.未实名登记:民用无人驾驶航空器未经实名登记实施飞行活动的,由(公安机关)责令改正,可以处(200元以下)的罚款,情节严重的,处(2000元以上2万元以下)的罚款。涉及境外飞行的民用无人驾驶航空器未依法进行国籍登记的,由(民用航空管理部门)责令改正,处(1万元以上10万元以下)罚款。
5.螺旋桨不能解锁的原因
6.(多选题)多旋翼无人机使用遥控器不能解锁造成的原因有哪些?(C D E F)
A 电机转向不正确
B 桨叶安装不正确
C 油门通道设置不正确
D 指南针未校准
E 遥控器未校准
F IMU未校准
2026年3月29日河南02
1.接收机 13 根接口线定义及用途?
FLYSKY FGR8B 是一款支持 AFHDS 3 协议的 8 通道接收机,其接口定义如下,按功能分为通道输出、电源、通信与状态三大类:
通道信号输出线(共 8 根)
CH1 (1):通道 1 信号,控制模型第一个执行机构(如油门/前轮转向),输出 PWM/PPM 信号
CH2 (2):通道 2 信号,控制模型第二个执行机构(如副翼/转向),输出 PWM/PPM 信号
CH3 (3):通道 3 信号,控制模型第三个执行机构(如升降舵/驱动),输出 PWM/PPM 信号
CH4 (4):通道 4 信号,控制模型第四个执行机构(如方向舵/灯光),输出 PWM/PPM 信号
NPA (8):通道 8/功能口 A,多功能接口(NewPort),可配置为 i-Bus/S-Bus/通道 8,用于高级通信或额外通道
NPB (7):通道 7/功能口 B,多功能接口(NewPort),可配置为 i-Bus/S-Bus/通道 7,用于传感器数据回传
NPC (6):通道 6/功能口 C,多功能接口(NewPort),可配置为 i-Bus/S-Bus/通道 6,支持自定义数据传输
NPD (5):通道 5/功能口 D,多功能接口(NewPort),可配置为 i-Bus/S-Bus/通道 5,用于扩展传感器数据接收
电源与电压检测线(共 3 根)
VCC/BVD (+):电源正极/电压检测,接收机供电正极(3.5~9V DC),同时集成电池电压检测(BVD)功能,可回传电池电压
GND (-):电源负极,接收机供电回路负极,与 VCC 构成供电回路
BVD 线束:电压检测专用线,单独的电压检测信号线,用于精准采集电池电压,配合发射机显示实时电量
通信、状态与辅助线(共 2 根)
Bind:对码/绑定键,接收机与遥控器配对的触发引脚,接地或触发信号进入绑定模式
LED:状态指示灯,接收机工作状态指示引脚,用于连接外部 LED 显示(如绑定中、信号丢失等状态)
S (Signal):通用信号脚,备用通用信号引脚,可用于额外的信号输出或输入,灵活扩展功能
2.适飞空域和管制空域
答:适飞空域高度是多少米,小型中型有没有适飞空域?
适飞空域真高不超过120米;
适飞空域:管制空域以外的空域为微型、轻型、小型无人驾驶航空器的适飞空域;
所以,小型无人驾驶航空器有适飞空域;中型无人驾驶航空器没有适飞空域
3. X型气动布局四抽四旋翼无人机,以日本手为例俯视右上角螺旋桨为CCW无人机姿态做下列改变时,请标出各旋翼的加减速变化(加速请填”+”,减速请填”-“,本题1分,错填漏填不得分)?
左上桨叶 右上桨叶 左下桨叶 右下桨叶
左手顶杆 – – + +
右手左压杆 – + – +
左手左压杆 + – – +
左手右压杆 – + + –
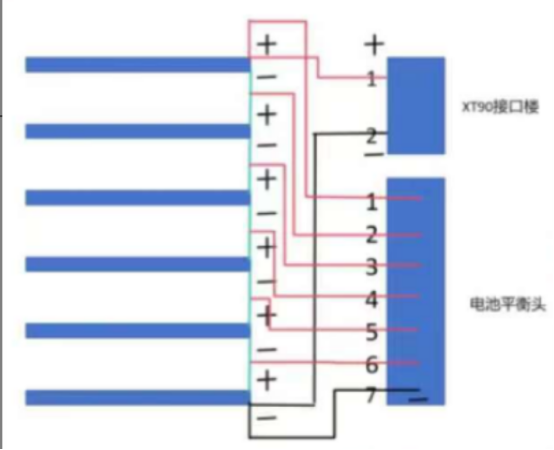
4. 6S锂电池连线:
5. E112°42′36″ N23°24′18″换算成度?
答:E112°+ 42′/60 + 36″/3600 =112.71°;
N23°+ 24′/60 + 18″/3600 = 23.405°;
2026年3月29日河南02
1. 根据《无人驾驶航空器飞行管理暂行条例》,超出操控员执照载明的操控范围用无人驾驶航空器飞行,会进行何种处罚?(少写、错写、漏写不得分)
民航管理部门处2000元-2万元罚款,暂扣执照6-12个月;情节严重吊销执照,2年内不受理申请
2. 标准大气条件下平均海平面标准气压多少百帕?10m高度气温10℃,510m气温多少℃?
答:标准海平面的气压为1013.25hpa;
10℃-(510-10)/100×0.65℃=6.75℃
3. X型气动布局四抽四旋翼无人机,以日本手为例俯视右上角螺旋桨为CCW无人机姿态做下列改变时,请标出各旋翼的加减速变化(加速请填”+”,减速请填”-“,本题1分,错填漏填不得分)?
左上桨叶 右上桨叶 左下桨叶 右下桨叶
左手顶杆 – – + +
右手左压杆 – + – +
左手左压杆 + – – +
左手右压杆 – + + –
4. 6S锂电池连线:
5. E112°42′36″ N23°24′18″换算成度?
答:E112°+ 42′/60 + 36″/3600 =112.71°;
N23°+ 24′/60 + 18″/3600 = 23.405°;
2026年3月10日湖北04
1.IMU,GCS,COMPASS的含义分别是什么?
IMU:惯性测量单元
GCS:地面控制站
COMPASS:磁罗盘
2.理论缺考冷静期为多久?理论补考冷静期为多久?
理论考试弃考后补考间隔时间不少于28个日历日
理论考试未通过后的补考间隔不少于28个日历日
3.经纬度换算 将度分秒换算成度?
换算方法:
1. 度分秒转十进制度:十进制度 = 度 + 分÷60 + 秒÷3600
2. 十进制度转度分秒: 先取整数部分为度,
小数部分×60的整数为分,
剩余小数×60为秒
4.当前温度为20度,求1000米的时候气温多少度?
标准海平面大气压是1013.25hPa(百帕)= 101.325kPa(千帕),温度是15℃;
海拔高度每升高100米,温度下降0.65℃;
21-(1000÷100)×0.65=13.5°
5.6S 10000mAh电池,2C充电倍率,单片电池容量为多少?理论状态下在满电电压的情况下它的能量是多少?
6S为串联结构,电池组容量等于单节电芯容量,即 10000mAh(10Ah)。
满电总能量:
6S满电电压:6 × 4.2V = 25.2V
总能量:25.2V × 10Ah = 252Wh
2026年2月10日河北03
1. 飞控接口 TELEM1 一般通常下连接什么外置设备?接口定义为 5V、TX、RX、GND,如何连接外置设备的 5V TX RX GND,请正确连线;- 5V —— 5V
– TX —— RX
– RX —— TX
– GND —— GND
飞控接口 TELEM1 一般通常情况下连接数传或者遥测
2. 6S 10000mah 电池,四旋翼无人机,单个电机的最大功率是 504W,该组电池应该选用多少 C 放电倍率?
10000mah=10Ah
单个电机最大功率为 504W,四旋翼总功率=4×504W=2016W
最大功率=最大电流×最大电压=6S×4.2V×10Ah×放电倍率 C=2016W
放电倍率 C=2016W÷(6S×4.2V×10Ah)=2016W÷252=8C
3. 多旋翼无人机的电机在安装时会有一定的倾角,这种涉及的作用是什么?从中心看 CCW 往哪边倾斜?
作用:抵消反扭矩,提高悬停稳定性
CCW 向右倾斜
4. 三轴六自由度是什么?
三轴指横轴(y),纵轴(X),立轴(z)
六个自由度:
绕横轴俯仰运动,沿横轴左右平移运动
绕纵轴滚转运动,沿纵轴前进后退移动
绕立轴偏航运动,沿立轴上升下降
5. 电调有几根线?画一个简易电调图。电调 80A、6s – 12s、LIPO、BEC 5.2 – 8.0V/10A、参数什么意思?(写错漏写不给分)
电调通常有 7 根或者 8 根线,其中:2 根最粗的红黑线连接动力电池为无人机提供电源;3 根中等粗细的线(三黑)连接动力电机,提供三项交流电,驱动电机旋转,任意调换其中两根可改变电机转向;剩余 2 – 3 根线(一黑一白一红)为杜邦线连接飞控用来接受和反馈控制信号(其中 3 根线中有一根是充当 BEC 给飞控供电)。
– 80A、Lipo:“80A” 表示电调持续稳定工作的最大电流为 80A,适用于锂电池(Lipo)供电的设备。
– 6s – 12S:表示电调适用于 6 节到 12 节锂聚合物电池串联供电。
– BEC 5.2 – 8.0V/10A:具备内置免电池电路功能,输出电压可调(5.2 – 8.0V),最大输出电流 10A,为接收机与舵机供电。
2026年1月8日广东02
1.《无人机驾驶航空器飞行管理暂行条例》中规定操控农用无人驾驶航空器无需取得执照,农用无人驾驶航空器定义中,主要指标参数是什么?
答:根据《无人驾驶航空器飞行管理暂行条例》第六十二条(八)农用无人驾驶航空器,是指最大飞行真高不超过30米,最大平飞速度不超过50千米/小时,最大飞行半径不超过2000米,具备空域保持能力和可靠被监视能力,专门用于植保,播种,投饵等农林牧渔作业,全程可以随时人工介入操控的无人驾驶航空器。
2.《民用无人驾驶航空器操控员执照考试管理办法》中多旋翼教员等级实践飞行考试科目要求有哪些?分别从考核科目,考核要求,通用要求,三个方面说明
答:起飞:油门操纵均匀,姿态正常
悬停:水平位移不超过正负2米,垂直位移不超过正负1米
顺/逆时针慢速水平偏转360度:水平位移误差不超过正负2米,垂直位移误差不超过正负1米,方向偏转无卡顿,项目考核时间为5至30秒内。
后退水平8字:依据航空器性能确定标准航线单个圆直径(小,中型:12米),航空器水平位移误差不超过正负2米,垂直位移误差不超过正负1米,航空器位移无卡顿,位移速度基本无变化,航向与标准航线切线夹角不超过25度。
定点降落:到达降落点后匀速下降,平稳降落。
通用要求:无危险动作与姿态,操作柔和,航空器部件完好。
3.应急返航的要求多旋翼无人机地面站考试行实践阶段的应急操作程序含什么内容,具体要求和评判标准?
(b)应急操作程序
(1)按实践考试委任代表指令要求在地面站进行应急返航操作,要求操作时间不多于15秒;
(2)模拟位置信息丢失,仅参照地面站显示的航空器航向,姿态,高度和速度信息(不得参考视觉扩展设备或返航角显示信息),以姿态模式遥控操纵无人机应急返航。需要满足以下要求:
(i)实践考试委任代表遮挡航迹或无人机位置信息,指令学员返航操作;
(ii)学员应操纵无人机应急返航,于30秒内确定与直线归航航线角误差不超过45度的归航航向并进入返航航线不少于10秒;
(iii)参照地面站显示的姿态,航迹,航向,高度等信息,小,中型无人机保持航线高度5米以内超视距飞行;
(iv)由实践考试委任代表恢复航迹或位置显示,学员在保障安全的条件下遥控无人机返回本场范围(小,中型无人机到达以起飞点为圆心不大于15米半径的区域),根据实践考试委任代表口令切换操纵模式进行降落。
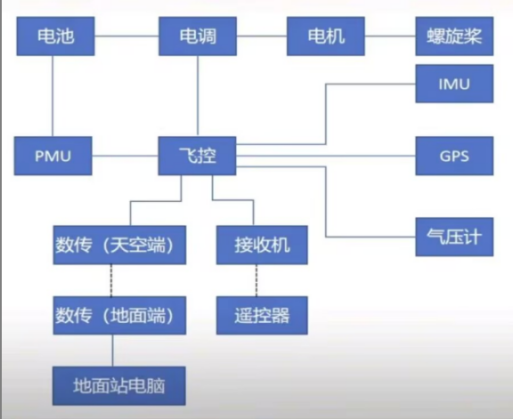
4.连线题(要求将可以连接的连起来):将这些部件IMU,动力电池,遥控接收机,无刷电调,有刷电机,PMU,GPS,指南针,螺旋桨连接起来,(多连,少连,错连均不得分).
PMU—动力电池——无刷电调——遥控接收机
有刷电机—-螺旋桨
5.镍铬电池,锂聚合物,高压锂电池的中英文,截止电压,标称电压?
答:镍铬电池:Ni-Cd;截止电压:1.1V,标称电压:1.2V
锂聚合物电池:Li Po;截止电压:3.6V。标称电压:3.7V
高压锂电池:Li HIV;截止电压:3.6V,标称电压:3.8V
2026年1月8日广东02
1、未获得教员等级的超视距驾驶员不能做哪些?(少写错写不得分)
答:未具有教员等级或教员等级过期未更新的执照持有人,不得从事下列活动:
(i)向准备获取单飞资格的人员提供训练;
(ii)签字推荐申请人获取执照或者增加等级所需的,理论考试和实践考试;
(iii)签字推荐申请人参加理论考试或者实践考试未通过后的补考;
(iv)签署学员飞行经历记录本和训练记录;
(v)在飞行经历记录本上签字,授予申请人单飞权利。
2、多旋翼无人机地面站考试科目中,实施阶段的应急操作程序包含哪些内容?写出具体要求和评判标准。
答:应急操作程序
(1)按实践考试表任务指令要求在地面站进行应急返航操作,要求操作时间不多于15秒;
(2)模拟位置信息丢失,仅参照地面站显示的航空器航向、姿态、高度和速度信息(不得参考视觉扩展设备或返航角显示信息),以姿态模式遥控操纵无人机应急返航。需要满足一下要求:
(i)实践考试表代表遮挡遥控无人机位置信息,指令学员返航操作;
(ii)学院应操作无人机应急返航,于30秒内确定与直线归航航迹角误差不超过±45°的归航航向并进入返航航线不少于10秒;
(iii)参照地面站显示的姿态、航向、高度等信息,小、中型无人机保持航线高度±1米以内返航飞行;
(iv)由实践考试表代表恢复航迹或位置显示,学员在保障安全的条件下遥控无人机返回本场着陆(小型无人机到达以起飞点为圆心不大于15米半径的区域,根据实践考试表代表口令切换操纵模式进行降落。
3、小型无人机执照操控控中型无人机如何处罚?
答:根据《无人驾驶航空器飞行管理暂行条例》第五十条规定:超出操控员执照载明范围操控民用无人驾驶航空器飞行的,由民用航空管理部门处2000元以上2万元以下的罚款,并处暂扣操控员执照6个月至12个月;情节严重的吊销其操控员执照,2年内不得受理其操控员执照申请。
4、IMU、动力电池、遥控器接收机、电调、电机、PMU、GPS、指南针、螺旋桨(多选、少选、错选均不得分)
答:遥控器接收机——电调——电机——螺旋桨
PMU——动力电池
IMU、GPS、指南针无飞控连接不了。
5、镍镉电池、锂聚合物电池、高压锂电池的中英文、截止电压、标称电压?
答:
镍镉电池:英文Ni-Cd 截止电压1.1V 标称电压1.2V;
锂聚合物电池:英文Li-Po 截止电压3.6V 标称电压3.7V;
高压锂电池:英文Li-HV 截止电压3.8V 标称电压3.8V。
2026年1月25日重庆02
1. 超视距实践飞行考试的通用条件?
实践飞行考试通用要求:无危险动作与姿态,操作柔和,航空器部件完好;
2. 5块4S1000mah的电池放电倍率100C,充电倍率2C,问该在串联和并联时最大放电电流、最大电压分别是多少?
单块电池:4S(4节串联),1000mAh = 1Ah,放电倍率100C
单节锂电池满电电压:4.2V
①串联(5块4S电池串联)
最大电压:单块4S电压 × 串联块数= (4.2V×4)×5 = 84V
最大放电电流:单块电池最大放电电流(串联时电流不变)
= 1Ah×100C = 100A
②并联(5块4S电池并联)
最大电压:单块4S电压(并联时电压不变)= 4.2V×4 = 16.8 V
最大放电电流:单块电池最大放电电流 × 并联块数
= (1Ah×100C)×5 = 500A
3. 2026年1月1日实施的新规非违闯入管制空域内热气球,飞艇情节严重的处于什么处罚?
2026年1月1日起,新修订的《中华人民共和国治安管理处罚法》(以下简称《治安管理处罚法》)及《无人驾驶航空器飞行管理暂行条例》(以下简称《条例》)正式实施,对违规进入管制空域的热气球、飞艇(均属于“低慢小”航空器)的情节严重行为,明确了拘留+罚款+没收违法所得/工具的组合处罚标准,具体如下:
《治安管理处罚法》(2026年1月1日施行)第四十六条:
违反有关法律法规关于飞行空域管理规定,飞行民用无人驾驶航空器、航空运动器材,或者升放无人驾驶自由气球、系留气球等升空物体,情节较重的,处五日以上十日以下拘留;飞行、升放前款规定的物体非法穿越国(边)境的,处十日以上十五日以下拘留。
《无人驾驶航空器飞行管理暂行条例》(2024年1月1日施行)第五十一条第二款:
未经批准操控微型、轻型、小型民用无人驾驶航空器在管制空域内飞行,或者操控模型航空器在空中交通管理机构划定的空域外飞行的,由公安机关责令停止飞行,可以处500元以下罚款;情节严重的,没收实施违规飞行的无人驾驶航空器,并处1000元以上1万元以下罚款。
4. 无人机废阻力有哪些?
废阻力有:压差阻力、摩擦阻力、干扰阻力
5. KV值定义?
KV值:代表每增加1V电压,电机在空载状态下,每分钟增加的转速
2026年1月24日江西02
1、多旋翼的螺旋桨与什么相似?为什么各半径位置线速度和迎角不一样?
参考答案:多旋翼的螺旋桨是定距螺旋桨,和固定翼飞机的螺旋桨更相似;
线速度不一样是因为线速度等于角速度乘半径,螺旋桨各处的角速度是一样的,所以越靠近桨毂处的线速度越小,越远离桨毂处的线速度越大。迎角不一样是为了保证螺旋桨各点处的升力处处相等。
2、LIIV单片电芯满电电压是多少?
参考答案:LIHV是锂离子聚合物高压电池,满电电压4.35V。
3、俯视右上角螺旋桨CCW,无人机做向后仰、向右滚转、向左偏航、向右偏航,改变时四个桨的加减速变化?
参考答案:
左上桨叶 右上桨叶 左下桨叶 右下桨叶
后仰 + + - -
右滚转 + - + -
左偏航 + - - +
右偏航 - + + -
4、连线题,PMU、IMU、GPS、LED、电池、电机、电调、飞控、接收机?
参考答案:
电池—电调—电机
PMU—飞控
飞控—IMU、接收机、LED、GPS
5、理论考试缺考需要间隔多少天?理论考试补考需要多少天?实践考试补考需要间隔多久?
参考答案:理论考试申请人有缺考记录的,再次申请任何考试日期与缺考日期间隔最少为28个日历日;
理论考试申请人成绩未达到考试通过分数,需要重新申请考试的视为补考,补考日期与上一次同科目考试日期间隔最少为28个日历日;
实践考试申请人有缺考记录的,再次申请任何考试日期与缺考日期间隔最少为14个日历日;
实践考试申请人实践考试未通过的,需要重新申请考试的视为补考,可以在考试结束后14个日历日后申请补考。
2025年12月24日广东04
1. 隔离空域的定义?
答:隔离空域是指专门分配给遥控驾驶航空器(如无人机)运行的空域,通过限制其他载人航空器的进入以规避碰撞风险;
2. 无人机MTOW的技术参数?
答:MTOW代表飞机的最大起飞重量;
知识点引入:在航空领域,MTOW代表飞机的最大起飞重量。在军事领域,MTOW可能指的是一种装备或系统的最大起飞重量。在工程和制造业中,MTOW可能用来描述某个设备或结构的最大承载重量;
3. 仰角的定义?
答:仰角是机体坐标系纵轴(X轴)与水平面之间的夹角;
4. 飞机失速的定义?
答:飞机迎角超过临界迎角,引起气流的不利分离,导致升力和操纵性急剧下降或升力急剧减小,阻力急剧增大。
5. 多旋翼的定义?
答:定义:多旋翼无人机是一种具有三个及以上旋翼轴的无人驾驶旋翼飞行器,通过多个旋翼产生的升力来支撑和保持飞行。
2026年1月14日山东02
1. 写出1045和1555两种类型的螺旋桨含义?(单位)
答:- 1045:10代表螺旋桨直径是10英寸;45代表螺旋桨螺距是4.5英寸;
– 1555:代表螺旋桨直径是15英寸;55代表螺旋桨螺距是5.5英寸;
2. 经纬度转化题:度分秒转化为度
经纬度度分秒换算度的方法:度 + 分 ÷ 60 + 秒 ÷ 3600;
例如:
3. 螺距的定义?
答:螺距是指螺旋桨旋转一周所前进或上升的距离;
4. 轴距的定义?
答:无人机的轴距是指对角线两个螺旋桨中心的距离;
通常以毫米为单位,它直接影响无人机的螺旋桨尺寸和载重能力。
5. 锂聚合物电池5000mah 6S 5C 25C,该电池最大充电电流为多少?最大放电电流?最大电压?单片电芯截至电压和标准电压为多少?
2025年11月11日湖北04
1、写出升力公式并解释各字母的含义?
答:L=1/2ρv²s CL;
L:升力; 1/2:常数;ρ:空气密度;
V:飞机相对于气流的速度,即空速;对于固定翼飞机指的是真空速;对于旋翼机,指的是桨叶的线速度;
线速度=角速度×桨叶半径;
S:升力面积;对于固定翼飞机指的是机翼垂直投影面积;对于旋翼机指的是旋翼面积;
CL:升力系数,跟旋翼和迎角的大小有关;
(本场考官要求,要写固定翼就全写固定翼,要答多旋翼就全部写多旋翼就可以了)
2、PMU、IMU、GPS、电调、电机、电池、飞控、LED灯、空速管、接收机、数传电台(垂起、多旋翼)?
答:多旋翼(配图连线关系:
电池→电调;电调→电机;
电池→PMU;PMU→飞控;
飞控→IMU;飞控→数传;
飞控→GPS;飞控→接收机;
飞控→LED灯)
3、3S2P10000mah(单片电芯容量)电池,20C3C 求充电电流和充电时间?
答:充电电流=电池组容量×充电倍率=2×10Ah×3C=60A;
充电时间=电池组容量÷充电电流=2×10Ah÷60A×60=20min;
或充电时间=需充电量比例÷充电倍率=100\%÷3C×60=20min;
4、模拟控制量、开关控制量定义及作用?
答:模拟控制量:杆、纽等连续的是模拟控制量;
作用:模拟用来控制操作姿态、舵面或设备连续动作;
开关控制量:拨动的是开关控制量;
作用:开关用来控制模式开关、开伞、一键返航等;
5、理论成绩有效期不超过(2)日历年;
实践成绩有效期不超过(60)日历日;
理论补考间隔不少于(28)日历日;
实践补考间隔不少于(14)日历日;
2025年11月17日河南01
1.无人机有几条链路?分别是什么?中断会怎么样?
答:无人机有3条链路分别是:遥控器上行链路;图传下行链路;数传上下行链路;
遥控器上行链路中断会导致无法向无人机发送控制指
图传下行链路中断会导致无人机航拍图传图像丢失
数传上行链路中断,无法在线重规划航线航点及发送任务指令等。
数传下行链路中断,地面站软件上的飞行状态和数据不再更新。
2.遥控器发射机是什么天线?使用前应该注意什么?
答:遥控器发射机使用全向天线,使用前应注意架设及布置方式与通信方向垂直;
3、无人机的一二三四通道沿、绕什么轴运动
答:以美国手为例:
通道1(CH1):副翼(AIL),右手控制遥感左右移动控制飞机沿横轴左右移动,绕纵轴横滚(Ro11);
通道2(CH2):升降(ELE),右手控制遥感上下移动,控制飞机沿纵轴前后移动,绕横轴俯仰(Pitch)
通道3(CH3):油门(THR),左手控制遥感上下移动,控制飞机沿立轴上下移动,控制飞机高度(Height)
通道4(CH4):方向(RUD),左手控制遥感左右移动,控制飞机沿立轴左右旋转,控制飞机方向(Direction);
4.理论通过后有效期(不超过24个日历月);理论未通过间隔(不少于 28 个日历日);实践通过后有效期(不超过 60 个日历日);实践未通过间隔(不少于 14 个日历日):实践考试过有效期后需从(综合问答)开始考试。
5、无人机低速飞行时,四种常见阻力及减少措施?
答:飞机在低速飞行时主要受到摩擦阻力、压差阻力、干扰阻力和诱导阻力;
摩擦阻力:增加机身表面光洁程度;
压差阻力:改变优化机身外形,趋近于流线型;
干扰阻力:整流包皮;
诱导阻力:增大展弦比,使用翼稍小翼;





暂无评论内容