
2026年4月3日江苏01
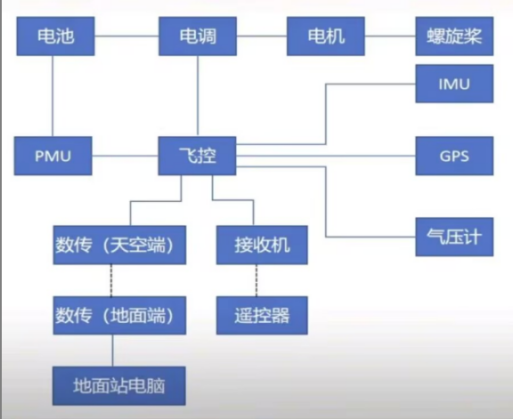
1.多旋翼无人机的动力系统由哪几部分组成?描述一下你参加教员飞行考试时使用的设备动力系统的参数?
答:动力电池+飞控+电机+螺旋桨;
电池:6S 22000mAh 2P,放电倍率15C,续航10-15分钟;
电机:60-80A 12S,支持FOC控制,带过流/过热保护;
电机:8120/100KV(125)、X8系列,单轴额定拉力4-6kg,功率800-1200W/轴;
螺旋桨:3011,2叶碳纤维;
2.APM的飞控通道接口含义?
答:
①INPUTS1~8
全称(含义):遥控信号输入通道(PWM/PPM)
核心功能:接收遥控器的控制指令(如油门、俯仰、横滚、偏航等信号)。
典型连接器:航空插头或插座。
②OUTPUTS1~8
全称(含义):输出信号输出通道(PWM)
核心功能:向执行机构输出指令,驱动执行机构动作。
典型连接器:航空插头或插座。
(3)Telemetry
全称(含义):数据接口(Telemetry)
核心功能:实现飞控与地面站的无线通信,传输飞行数据与控制指令。
典型连接器:3DR数传电台。
④USB
全称(含义):USB调试接口
核心功能:用于固件升级、参数配置、有线调试,也可临时为飞控供电。
典型连接器:电脑USB线。
(5)PM
全称(含义):电源模块接口(PowerModule)
核心功能:采集电池电压、电流数据,同时为飞控和接收机供电。
典型连接器:电源适配器。
⑥I2C
全称(含义):I2C总线扩展接口
核心功能:连接兼容I2C协议的扩展传感器。
典型连接器:超声波传感器、光流传感器、气压计、LED模块。
⑦GPS
全称(含义):GPS模块接口
核心功能:提供定位、导航、速度数据,支持定点悬停、返航等功能。
典型连接器:GPS+罗盘(指南针)模块。
⑧Reset
全称(含义):复位按钮
核心功能:重启飞控,解决死机、配置异常等问题。
典型连接器:无。
⑨FORWARD
全称(含义):安装方向标识
核心功能:标记飞控的朝向。
典型连接器:无。
通道定义:
通道1:横滚(Roll)通道 2:俯仰(Pitch)通道 3:油门(Throttle)通道 4:偏航(Yaw);通道5-8:辅助通道(飞行模式切换、返航、一键起飞等)
3.X型气动布局四轴旋翼无人机,以mode1为例俯视右上角螺旋桨为CCW无人机姿态做下列改变时,请标出各旋翼的加减速变化(加速或减速),并说明理由。
左上桨叶 右上桨叶 左下桨叶 右下桨叶,左手舵机 右手舵机 左舵机 右舵机 (mode1是日本手,mode2是美国手)
4.垂直地面站的仪表盘的俯仰角和翻滚角多少度?
答:①机头抬起(爬升)状态
现象:地平线向下移动,飞机转弯看起来在“天空”区域里。
角度判断方法:看飞机转弯上方,与水平线对齐的数字,这个数字就是当前的俯仰角度。
②机头下俯(下降)状态
现象:地平线向上移动,飞机转弯看起来在“地面”区域里。
角度判断方法:看飞机转弯下方,与水平线对齐的数字,这个数字就是当前的俯仰角度。
③机头向右滚转状态
现象:地平线向左倾斜,屏幕上的三角标记指向右侧刻度。
角度判断方法:看三角标记对准的左侧数字,这个数字就是当前的滚转角角度。
④机头向左滚转状态
现象:地平线向右倾斜,屏幕上的三角标记指向左侧刻度。
角度判断方法:看三角标记对准的右侧数字,这个数字就是当前的滚转角角度。
5.经纬度转换
经纬度换算分秒的方法:
1)小数点前取整;
2)取整数后小数点后6位得数加前取整;
3)取整数后小数点后6位得数为秒;经纬度换算分秒的方法:
例:113°10’28” = 113°10’60 + 28”/3600 = 113.17444444
2026年4月19日北京01
1.根据《无人驾驶航空器飞行管理暂行条例》,什么是空域控制能力?
答:空域控制能力,是指通过电子地图等技术措施控制无人驾驶航空器的速度与高度与水平范围的能力。
2.接收机的各个接口或射频的名称(13个,通道14需标注名称,7,8,9为单独引脚,此题1分)
答:1-6号:标准PWM舵机通道
通道1:副翼
通道2:升降舵
通道3:油门
通道4:方向
3.写出下面图片的告警信息(3个)状态信息(5个以上)告警信息(3个)
答:
① DISARMED:未解锁(上锁状态),无人机无法启动电机,禁止起飞
② PreArm: INS not calibrated:预编程检查失败,惯性导航系统INS未校准
③ GPS: No GPS:无GPS定位信号
④ 飞行模式:Stabilize(自稳模式):无人机处于稳定控制状态,适合新手操作
⑤ 空速 AS 0.0:当前空速为0,无人机处于静止状态
⑥ 地速 GS 0.0:当前地速为0,无人机处于水平移动状态
⑦ 时间 00:48:28:当前飞行计时(上电时长)为48分28秒
⑧ 方位 NE(北东方向):无人机航向为东北方向
⑨ 姿态角:俯仰、横滚姿态均为0°,无人机处于水平静止状态
⑩ 高度/垂直速度:垂直速度为0,无人机处于静止状态
⑪ 0°:飞控状态参数,代表当前无故障/无失控保护触发
4.X型气动布局四轴四旋翼无人机,俯视右上角螺旋桨为CCW,无人机姿态做下列改变时,请标出各旋翼的加减速变化(加速请填“+”,减速请填“-”),本题1分,错误项不得分。
日本手:左上旋桨 右上旋桨 左下旋桨 右下旋桨
左手前推 – + – +
右手后推 – + – –
左手后推 – + – +
右手左推 – + – +
5.计算题:6S 10000mAh电池,最大放电倍率25C,最大充电倍率5C,飞行15分钟,剩余电量20%,求4旋翼单个电机的平均放电电流是多少A?
答:10000mAh = 10Ah
平均放电电流 = 10Ah × (1-20%) = 8Ah
平均放电电流 = 8Ah ÷ 15min = 32A
平均放电电流 = 32A ÷ 4 = 8A
2026年4月12日山东05
1.根据《无人驾驶航空器飞行管理暂行条例》,什么是空域保持能力?(新题)
答:空域保持能力,是指通过电子围栏等技术措施控制无人驾驶航空器的高度与水平范围的能力。
2. 接收机的各个接口或针脚的名称(13个,通道14需标注出名称,7,8,9为单独引脚,此题1分) 答:1-6号:标准PWM舵机通道
(每排3针:信号 / 电源 + / 地 -)
编号名称功能说明[1]CH1 通道1(副翼 / Aileron)多旋翼 / 固定翼核心控制通道,对应遥控器右摇杆左右(横滚)[2]CH2 通道2(升降 / Elevator)对应遥控器右摇杆前后(俯仰),控制无人机抬头 / 低头[3]CH3 通道3(油门 / Throttle)对应遥控器左摇杆前后,控制电机转速与总推力[4]CH4 通道4(方向 / Rudder)对应遥控器左摇杆左右(偏航),控制无人机转向 / 自旋[5]CH5 通道5辅助通道,可用于云台、灯光、模式切换等扩展功能[6]CH6 通道6辅助通道,可用于起落架、相机快门等扩展功能7-9号:单独功能引脚
编号名称功能说明[7]PPM 信号输出端串行PPM信号输出,可单根线连接飞控,替代多路PWM接线[8]电源正极(VCC/+)接收机供电输入,支持4.8-10V DC,可接电池或电调BEC[9]电源负极(GND/-)接地引脚,与电源正极配对使用其他功能接口:10-13
编号名称功能说明[10]电池电压回传接口(B+)连接电池正极,用于实时回传电池电压到遥控器,实现低压报警[11]电池电压回传接口(B-)连接电池负极,与B+配对完成电压采样[12]LED 指示灯接口外接LED指示灯,用于显示接收机对频、信号、供电状态[13]2.4G 天线无线信号发射 / 接收天线,用于与遥控器通信,需远离金属部件以保证信号强度
3. X型气动布局四轴四旋翼无人机,俯视右上角螺旋奖为CCW,无人机姿态做下列改变时,请标出各旋翼的加减速变化(加速请填”+”,减速请填”-“,本题1分,错填漏填不得分)
日本手 左上桨叶 右上桨叶 左下桨叶 右下桨叶
左手前推 – – + +
右手左推 – + – +
左手右推 – + + –
右手拉杆 – – – –
4.写出下面图片的告警信息(3个)状态信息(5个以上)
答:告警信息(3个) ① DISARMED:未解锁(上锁状态),无人机无法启动电机,禁止起飞
② PreArm: RC not calibrated:预解锁检查失败,惯性导航系统INS未校准③GPS:No GPS:无gps定位信号
① 飞行模式:Stabilize(自稳模式):无人机处于增稳控制状态,适合新手操作
② 空速 AS 0.0:当前空速为0,无人机处于静止状态
③ 地速 GS 0.0:当前地速为0,无人机无水平移动
④ 时间 00:48:28:当前飞行计时(上电时长)为48分28秒
⑤ 方位 NE(北东方向):无人机机头朝向东北方位
⑥ 姿态角显示:俯仰、横滚姿态均为0°,无人机处于水平静止状态
⑦ 高度 / 垂直速度显示:垂直速度为0,无人机无升降运动
⑧ 0>0:飞控状态参数,代表当前无故障 / 无失控保护触发
5.计算题:6S 10000mah电池,最大放电倍率25C,最大充电倍率5C,飞行15分钟,剩余电量20%,求4旋翼单个电机的平均放电电流是多少A?
答:总平均放电电流=所耗容量÷放电时间=[10Ah×(1-20%)]÷(15÷60)h=32A
单个电机平均放电电流=总放电电流÷总电机数量=32A÷4=8A
2026年4月10日河北03
1. 地面站考试科目应急操作程序
模拟位置信息丢失,仅参照地面站显示的航空器航向、姿态、高度和速度信息(不得参考视觉扩展设备或返航角显示信息),以姿态模式遥控操纵无人机应急返航。
学员应操纵无人机应急返航,于30秒内确定与直线归航航线角误差不超过±45°的归航向并进入返航航线不少于10秒;参照地面站显示的姿态、航迹、航向、高度等信息,小、中型无人机保持航线高度±5米以内超视距飞行;由实践考试委任代表恢复航迹或位置显示,学员在保障安全的条件下遥控无人机返回本场范围(小、中型无人机到达以起飞点为圆心不大于15米半径的区域)。
2. 接收机的各个接口或针脚的名称(13个,通道14需标注出名称,7,8,9为单独引脚,此题1分) 答:1-6号:标准PWM舵机通道
(每排3针:信号 / 电源 + / 地 -)
编号名称功能说明[1]CH1 通道1(副翼 / Aileron)多旋翼 / 固定翼核心控制通道,对应遥控器右摇杆左右(横滚)[2]CH2 通道2(升降 / Elevator)对应遥控器右摇杆前后(俯仰),控制无人机抬头 / 低头[3]CH3 通道3(油门 / Throttle)对应遥控器左摇杆前后,控制电机转速与总推力[4]CH4 通道4(方向 / Rudder)对应遥控器左摇杆左右(偏航),控制无人机转向 / 自旋[5]CH5 通道5辅助通道,可用于云台、灯光、模式切换等扩展功能[6]CH6 通道6辅助通道,可用于起落架、相机快门等扩展功能7-9号:单独功能引脚
编号名称功能说明[7]PPM 信号输出端串行PPM信号输出,可单根线连接飞控,替代多路PWM接线[8]电源正极(VCC/+)接收机供电输入,支持4.8-10V DC,可接电池或电调BEC[9]电源负极(GND/-)接地引脚,与电源正极配对使用其他功能接口:10-13
编号名称功能说明[10]电池电压回传接口(B+)连接电池正极,用于实时回传电池电压到遥控器,实现低压报警[11]电池电压回传接口(B-)连接电池负极,与B+配对完成电压采样[12]LED 指示灯接口外接LED指示灯,用于显示接收机对频、信号、供电状态[13]2.4G 天线无线信号发射 / 接收天线,用于与遥控器通信,需远离金属部件以保证信号强度
3. X型气动布局四抽四旋翼无人机,以model-日本手为例俯视右上角螺旋桨为CCW无人机姿态做下列改变时,请标出各旋翼的加减速变化(加速请填”+”,减速请填”-“,本题1分,错填漏填不得分)
日本手 左上桨叶 右上桨叶 左下桨叶 右下桨叶
左手前推 – – + +
右手左推 – + – +
左手右推 – + + –
右手拉杆 – – – –
4. 写出下面图片的告警信息(3个)状态信息(5个以上)
答:告警信息(3个) ① DISARMED:未解锁(上锁状态),无人机无法启动电机,禁止起飞
② PreArm: RC not calibrated:预解锁检查失败,遥控器未校准,是飞控禁止解锁的核心告警
③ 姿态告警(地平线异常 / 姿态超限提示):界面地平线偏移,存在姿态异常告警(补充:部分版本将DISARMED、RC未校准、姿态异常列为核心告警)
状态信息(5个)
① 飞行模式:Stabilize(自稳模式):无人机处于增稳控制状态,适合新手操作
② 空速 AS 0.0:当前空速为0,无人机处于静止状态
③ 地速 GS 0.0:当前地速为0,无人机无水平移动
④ 时间 00:48:28:当前飞行计时(上电时长)为48分28秒
⑤ 方位 NE(北东方向):无人机机头朝向东北方位
⑥ 姿态角显示:俯仰、横滚姿态均为0°,无人机处于水平静止状态
⑦ 高度 / 垂直速度显示:垂直速度为0,无人机无升降运动
⑧ 0>0:飞控状态参数,代表当前无故障 / 无失控保护触发
5. 将坐标(E112.210000°、N23.705000°)转换成度分秒制。(本题1分,计算过程结果都要正确)
答:
E112.21000° = E112°12′36″
过程:
度=112.21000° 取整数=112°
分=0.21°×60=12.6° 取整数=12′
秒=0.6°×60=36″ 取整数=36″
N23.705000° = 23°42′18″
过程:
度=23.705000° 取整数=23°
分=0.705000°×60=42.3° 取整数=42′
秒=0.3°×60=18″ 取整数=18″
2026年4月8日吉林01
1.多旋翼无人机的动力系统由哪几部分组成?描述一下你参加教员飞行考试时使用的设备动力系统的参数?
答:动力电池-电子调速器-动力电机-螺旋桨;
电池:6S 22000mAh 2P,放电倍率15C,续航10-15分钟;
电调:60-80A 12S,支持FOC控制,带过流/过热保护;
电机:8120/100KV(12S)、X8系列,单轴额定拉力4-6kg,功率800-1200W/轴;
螺旋桨:3011,2叶碳纤维;
2.请将下列经纬度换算成十进制,结果精确到小数点后四位
N37°41′16″ E115°34′31″?
答:
1. 度分秒转十进制度:十进制度 = 度 + 分÷60 + 秒÷3600
2. 十进制度转度分秒: 先取整数部分为度,
小数部分×60的整数为分,
剩余小数×60为秒
N37°41′16″ =37+ 41÷60 + 16÷3600 =N37.6878°
E115°34′31″ =115+ 34÷60 + 31÷3600 =E115.5753°
3. X型气动布局四抽四旋翼无人机,以mode1为例俯视右上角螺旋桨为CCW无人机姿态做下列改变时,请标出各旋翼的加减速变化(加速请填”+”,减速请填”-“,本题1分,错填漏填不得分)?
左上桨叶 右上桨叶 左下桨叶 右下桨叶
左手顶杆 – – + +
右手左压杆 – + – +
左手左压杆 + – – +
左手右压杆 – + + –
(mode1是日本手,mode2是美国手)
4.遥控器接收机14个通道名称 答:1. CH1:副翼 AIL
2. CH2:升降舵 ELE
3. CH3:油门 THR
4. CH4:方向舵 RUD
5. CH5:陀螺仪感度 / 飞行模式
6. CH6:俯仰感度 / 辅助1
7. CH7:横滚感度 / 辅助2
8. CH8:偏航感度 / 云台俯仰
9. CH9:云台偏航 / 灯光控制
10. CH10:降落伞 / 抛投
11. CH11:蜂鸣器 / 辅助3
12. CH12:收放起落架
13. CH13:摄像拍照
14. CH14:备用通道
5.地面站软件仪表识别各图标,3个提示的错误状态 5个正常显示的信息 都是英文
2026年2月6日山西03
1. 实践飞行考试中,360度自旋水平偏差(±2),垂直偏差(±1),完成时间(5至30秒内)。8字飞行水平偏差(±2)垂直偏差(±1),航向偏差(±20°)
2. 6s2p16000mah的电池25C5C 飞行10分钟,剩余20%的电,八旋翼求单个电机的平均电流。(押中的题)
答:平均电流=总电流+(消耗电量÷飞行时间)÷8=(16ah×(1-20%))÷(10min÷60min)÷8=9.6A
3. 某电调160A,3s-6s,BEC,HV,4.2-5.8V/10A,Lipo解释含义?(押中的题)
答:150A:代表电调持续、稳定工作的最大电流为150A;3s-6s、Lipo:表示电调可以使用由3-6节电芯串联组成的锂聚合物电池,对应的电压范围通常为11.1V-22.2V(15-3.7V);BEC,HV,4.2-5.8V/10A:表示该电调具备内置的免电池电路(BEC)功能,能够将输入的电池电压转换为稳定直流电的范围4.2V到5.8V之间,并提供10A的电流输出;HV:表示该电调支持较高的输入电压,能够适应更高电压的电池组,以满足高功率设备的需求。
4. 6S10000mAh电池,电机KV值:400 螺旋桨直径40cm,桨尖线速度为(m/s)?(押中的题)
答:电机转速=3.7V×6×400=8880转/分钟
桨尖线速度=3.14×0.4×8880÷60=185.89m/s
5. 解释相对,海拔,真实高度的含义,并举例出一个传感器?
答:相对高度是指飞行器相对于某一特定参考平面(如起飞点、地面某一标志物等)的垂直距离,用气压传感器测量。海拔高度,指无人机所在位置相对于海平面的垂直高度,用GPS测量。真实高度是相对于正下方地面或障碍物顶部的垂直高度,用超声波传感器测量。
![图片[1]-朱艳明口试真题-更炽热无人机CAAC执照备考](https://caac.hotteruav.cn/wp-content/uploads/2026/04/image-45.png)





暂无评论内容