

2026年5月8日云南02
1.美国手、日本手通道英文?
2.编号:MD-92-FS-02是哪个文件?并出其下发日期?
答:《民用无人驾驶航空器操控员执照考试管理办法》
编号:MD-92-FS-02下发日期:2024年5月11日
3.锂聚合物电池6S2P10000mah(单片)15C,该电池组的最大放电电流、满电电压分别为多少?若电池电量剩余50%,以0.5C充电,则需要多久充满?
答:最大放电电流=额定容量×最大放电倍率=(10A×2)×15C=300A
电池组满电电压=单片电池电压×串联数=4.2V×6=25.2V
充电时间=所充比例÷充电倍率=(1−50%)÷0.5C=1h=60min
4.飞控接口VCC GND RX TX分别代表什么含义?
答:VCC(Voltage Common Collector):电源正极电路中的供电端,为无人机的飞控、电机、图传等所有电子设备提供工作所需的电压;
GND(Ground):电源负极/接地电路中的回流端,形成完整的电流回路,确保电子设备能正常工作;
TX(发送)(Transmit):属于串行通信的输出信号,来自当前设备的发送引脚,连接到对方的接收引脚(RX);
RX(接收)(Receive):属于串行通信的输入信号,来自当前设备的接收引脚,连接到对方的发送引脚(TX)。
5.多旋翼如何实现左旋转?(仰视状态)90°
答:CW桨叶加速 CCW桨叶减速;
2026年5月7日云南02
1.UOM全称是什么?(错一个字都不行)
答:国家无人驾驶航空器一体化综合监管服务平台(民用无人驾驶航空器综合管理平台)
2.FUTABA遥控器菜单中英文连续
答:
USER MENU: 用户菜单
LINK MENU: 链接菜单
MODEL SELECT: 模型选择
MODEL TYPE: 模型类型
SYSTEM: 发射制式
FUNCTION: 功能设置
REVERSE(REV): 舵机反向
SUB TRIM: 中立微调
DUAL RATE: 大小舵
END POINT: 舵机行程
FAIL SAFE: 失控保护
TRAINER: 教练功能
3..当前温度15℃,升高3500米为多少℃?
答:15℃ – 3500/100 × 0.65℃ = -7.75℃;
在标准大气压,对流层内,每升高一百米,温度下降0.65℃
4.已知6S2P 16000mAh 锂聚合物电池15C 2C,求电池额定电压、最大放电电流,以及剩余50%电量时的充电时间?
答:电池额定电压 = 单片电芯标称电压 × 串联数 = 3.7V × 6 = 22.2V
最大放电电流 = 额定容量 × 最大放电倍率 = 16Ah × 15 = 240A
充电时间 = 所充比例 ÷ 充电倍率 = (1 – 50%) ÷ 2C = 0.25h = 15min
5.以下哪组经纬度选项不能正确确定一个点?(ABCDE)
A: N100° E80° N>90°
B: S120° W100° S>90°
C: E200° W30° E>180° 都为经度
D: N50° S50° 都为纬度
E: N100° W90° N>90°
F: S50° E50° √
2026年4月27日湖南02
1.升力公式及含义。
答:L = 1/2ρV²SCL
L: 升力 1/2: 常数 ρ: 空气密度
V: 飞机相对于气流的速度,即空速;
对于固定翼飞机指的是相对于空气的运动速度(空速);
对于旋翼机指的是桨叶的线速度;线速度=角速度×桨叶半径,v = ωr;
S: 参考面积;
对于固定翼飞机指的是机翼投影面积;
对于旋翼机指的是单个旋翼的桨盘面积,或者旋翼扫掠面积;
CL: 升力系数,跟翼型、迎角、机翼平面形状的大小有关;
2.伺服舵机组成。
答:直流电机、电位器、控制电路、外壳与接插件、减速齿轮组
3.kv值的含义。
答:空载状态下,每增加1V电压,电机每分钟转速增加的数值
4.教员等级更新的具体要求。
答:教员等级,在其级别后之前第36个日历月结束时有效期满,有效期内按照本章第92.93条新增教员等级时,其有效期自新增之日起计算。教员等级更新人员可以在其教员等级有效期满30个工作日前申请更新,但应当符合下列条件:(1)通过了所持有的任何一个教员等级的实践考试,则其所持有的所有教员等级均视为更新,但其操作技能和相应类别、级别和别别(如适用)等级熟练检查或者定期检查不在有效期内的除外。(2)按照本款第(1)项进行更新的,其教员等级有效期自更新之日起计算。
5.超视距和视距内飞行经历具体要求
答:
一、视距内驾驶员
1.总飞行经历时间:不少于44小时
2.教员带飞时间:不少于10小时
3.单飞时间:不少于5小时
4.飞行模拟训练时间:不超过22小时
二、超视距驾驶员
1.总飞行经历时间:不少于56小时
2.教员带飞时间:不少于15小时
3.单飞时间:不少于5小时
4.飞行模拟训练时间:不超过28小时
5.地面站带飞时间:不少于3小时
6.地面站单飞时间:不少于1小时
三、教员
1.总飞行经历时间:不少于120小时
2.教员带飞时间:不少于15小时
3.单飞时间:不少于5小时
2026年4月26日湖南02
- 多旋翼飞行器在飞行过程中,螺旋桨出现积灰是什么原因引起的?
答:飞机积灰是指飞机机体表面某些部位聚集灰尘的现象。它主要由云中过冷水滴或降水中的过冷雨碰到飞机机体后结冰形成的,也可由水汽直接在机舱表面凝结形成。
飞机在飞行中飞行时间过长易导致积灰。在寒冷季节,地面温度下降的飞机也会形成积灰。
十字布局的多旋翼如何实现自稳航?
答:在俯视情况下,顺时针旋转的电机减速,逆时针旋转的电机加速;
画出一个电调,并标注出有多少根线,分别什么颜色,连接哪些部件?
(图片描述:手绘电调示意图,左侧标注“电池”并引出两根线(红+,黑-)连接到电调;电调右侧标注“电机”并引出三根线(通常为黄、蓝、黑或红、白、黑);电调下方标注“飞控”,引出三根线(白、红、黑或信号线、正、负)。具体颜色未明确,但常见为:电池端:红(正极)、黑(负极);电机端:三根相位线(如黄、蓝、绿或红、白、黑);飞控端:白(信号)、红(正)、黑(负)。)
《民用小型无人机驾驶员执照》规定训练机构规范里对教员飞行经历要求有哪些?
答:
10.4.1 教员飞行经历时间不超过10小时。
10.4.2 教员每飞行经验时间不超过8小时。
10.4.3 在任何连续24小时内,教员飞行经历时间与教学时间合计不应超过10小时。
简述多旋翼GPS模式、姿态模式、纯手动模式的区别(多旋翼专业题)?
答:(能描述纯手动模式、外回路控制参与工作;姿态模式:内回路参与工作;外回路不参与工作;人工修正(即GPS模式):内外回路均参与工作)。
2026年4月7日江苏02
1、内外回路表示以及核心作用
答:内回路是指飞行控制系统中的一个闭合控制回路,主要用于姿态控制和稳定性增强;外回路是接收用户飞行指令和位置/速度传感器反馈,输出目标姿态角给内回路,实现无人机位置、速度、航迹宏观控制的上层闭合控制回路。
内回路的核心作用是:维持无人机姿态稳定;
外回路的核心作用是:实现无人机的定位与导航。
2.6s20000mah,最大放电25C,充电5C,训练27分钟还剩10%,平时训练平均多少C?
答:第一种方法:
平均放电倍率=所充比例÷充电倍率=(1-10%)÷(27÷60)h=2C
3、民用驾驶航空器未实名登记处罚?
答:民用无人驾驶航空器未经实名登记实施飞行活动的,由公安机关责令改正,可以处200元以下的罚款;情节严重的,处2000元以上2万元以下的罚款。
涉及境外飞行的民用无人驾驶航空器未依法进行国籍登记的,由民用航空管理部门责令改正,处1万元以上10万元以下的罚款。
4、什么情况无人机必须买保险?
答:根据《民用无人驾驶航空器暂行管理条例》第十二条 使用民用无人驾驶航空器从事经营性飞行活动,以及使用小型、中型、大型民用无人驾驶航空器从事非经营性飞行活动,应当依法投保责任保险。
微型,轻型无人机从事非运营活动不需要购买责任险;
5、解释电调2s-6s,35A/45A
答:2S-6S:表示电调可以使用由3-6节电芯串联组成的锂聚合物电池,对应的电压范围通常为7.4V-25.2V;(1S=3.7V/4 2V):
35A/45A:
35A代表电调持续、稳定的工作电流为35A;
45A代表电调能承受的瞬间最大电流为45A。
2026年4月3日天津03
1.十字型无人机向左偏转,电机如何工作?
答:在俯视情况下,顺时针旋转的电机加速,逆时针旋转的电机减速。
2.螺旋桨积冰的原因?
答:螺旋桨出现积冰的主要原因是飞机在零度以下、在含有过冷水滴的云、雾、冻雨、湿雪中持续飞行,水滴撞击桨叶表面后瞬间冻结,形成积冰。
3.风向225航向135,飞机是怎么飞行?
答:侧风飞行
4.视距内、超视距学员满足什么条件能够申请相应执照和等级?
答:1、具备完全民事行为能力;
2、初中以上文化程度;
3、无可能影响民用无人驾驶航空器操控行为的疾病史,无吸毒行为记录;
4、近5年内无因危害国家安全、公共安全或者侵犯公民人身权利、扰乱公共秩序的故意犯罪受到刑事处罚的记录;
5、有效体检合格证(如适用),申请人不能满足本款要求的,局方应当在其执照上签注相应限制;
7、完成了相应民用无人驾驶航空器等级的航空知识训练,由提供训练或者评审其自学情况的授权教员在其训练记录上签字,证明该申请人可以参加规定的理论考试,并按要求通过了相应航空知识的理论考试;
8、完成了相应民用无人驾驶航空器等级的操控技能训练,满足适用于所申请民用无人驾驶航空器等级的飞行经历要求,由提供训练的授权教员在其训练记录上签字,证明该申请人可以参加规定的实践考试,并按要求通过了相应操控技能的实践考试;
9、执照被暂扣的,暂扣期内不得申请任何执照和等级。
5.应急返航要求
答:操作时间≤15秒;位置丢失后,30内确定归航航向,误差≤±45°,进入航线≥10s,高度偏差±5m,返航至起飞点15m半径内降落。
2026年4月2日天津03
1.十字型无人机向左偏转,电机如何工作?
答:在俯视情况下,顺时针旋转的电机加速,逆时针旋转的电机减速。
2.螺旋桨积冰的原因?
答:螺旋桨出现积冰的主要原因是飞机在零度以下、在含有过冷水滴的云、雾、冻雨、湿雪中持续飞行,水滴撞击桨叶表面后瞬间冻结,形成积冰。
3.风向315航向135,飞机是怎么飞行?
答:顺风飞行
4.教员飞行经历时间要求
教员每日飞行经历时间不应超过10 小时。
教员每日实施飞行训练教学的时间不应超过8小时。
在任何连续24小时内,教员的飞行经历时间与教学时间合计不应超过10小时。
5. 视距内、超视距学员满足什么条件能够申请相应执照和等级?
答:1、具备完全民事行为能力;
2、初中以上文化程度;
3、无可能影响民用无人驾驶航空器操控行为的疾病史,无吸毒行为记录;
4、近5年内无因危害国家安全、公共安全或者侵犯公民人身权利、扰乱公共秩序的故意犯罪受到刑事处罚的记录;
5、有效体检合格证(如适用),申请人不能满足本款要求的,局方应当在其执照上签注相应限制;
7、完成了相应民用无人驾驶航空器等级的航空知识训练,由提供训练或者评审其自学情况的授权教员在其训练记录上签字,证明该申请人可以参加规定的理论考试,并按要求通过了相应航空知识的理论考试;
8、完成了相应民用无人驾驶航空器等级的操控技能训练,满足适用于所申请民用无人驾驶航空器等级的飞行经历要求,由提供训练的授权教员在其训练记录上签字,证明该申请人可以参加规定的实践考试,并按要求通过了相应操控技能的实践考试;
9、执照被暂扣的,暂扣期内不得申请任何执照和等级。
2026年3月28日山东03
1.十字型无人机向左偏转,电机如何工作?
答:在俯视情况下,顺时针旋转的电机加速,逆时针旋转的电机减速。
2.《民用无人驾驶航空器实名登记和激活要求》《无人驾驶航空器系统运行识别规范》两个文件实施时间?
答:《民用无人驾驶航空器实名登记和激活要求》和《民用无人驾驶航空器系统运行识别规范》,计划于2026年5月1日正式实施。
3.风向315航向135,飞机是怎么飞行?
答:顺风飞行
4.螺旋桨积冰的原因?
答:螺旋桨出现积冰的主要原因是飞机在零度以下、在含有过冷水滴的云、雾、冻雨、湿雪中持续飞行,水滴撞击桨叶表面后瞬间冻结,形成积冰。
5.暂行条例规定小型无人机驾驶航空器的定义描述?
答:小型无人驾驶航空器,是指空机重量不超过15千克且最大起飞重量不超过25千克,具备符合空域管理要求的空域保持能力和可靠被监视能力,全程可以随时人工个入操控的无人驾驶航空器,但不包括微型、轻型无人驾驶航空器。
2026年3月24日海南02
1.十字型无人机,它向左偏转的话,电机如何如何旋转。
答:俯视状态下:CW旋转的电机加速,CCW旋转的电机减速
2.视距内、超视距学员满足什么条件能够申请相应执照和等级?
答:1、具备完全民事行为能力;
2、初中以上文化程度;
3、无可能影响民用无人驾驶航空器操控行为的疾病史,无吸毒行为记录;
4、近5年内无因危害国家安全、公共安全或者侵犯公民人身权利、扰乱公共秩序的故意犯罪受到刑事处罚的记录;
5、有效体检合格证(如适用),申请人不能满足本款要求的,局方应当在其执照上签注相应限制;
7、完成了相应民用无人驾驶航空器等级的航空知识训练,由提供训练或者评审其自学情况的授权教员在其训练记录上签字,证明该申请人可以参加规定的理论考试,并按要求通过了相应航空知识的理论考试;
8、完成了相应民用无人驾驶航空器等级的操控技能训练,满足适用于所申请民用无人驾驶航空器等级的飞行经历要求,由提供训练的授权教员在其训练记录上签字,证明该申请人可以参加规定的实践考试,并按要求通过了相应操控技能的实践考试;
9、执照被暂扣的,暂扣期内不得申请任何执照和等级。
3.是无人机积冰的原因。
答:螺旋桨出现积冰的主要原因是飞机在零度以下、含有过冷水滴的云层或降水中飞行,水滴撞击桨叶表面后瞬间冻结,形成积冰。
4.风向315,航向135,飞机是怎么飞行的?
答:飞机是顺风飞行
5.暂行条例规定的中型无人驾驶航空器的规定
答:最大起飞重量不超过150Kg,但不包括微型、轻型、小型无人驾驶航空器
2026年3月8日江苏02
1. 十字型无人机如何实现向左偏航(基础飞行原理题 常考题型)
俯视状态下:CW旋转的电机加速,CCW旋转的电机减速
2. 视距内超视距申请执照考试时间要求?(基础法规考试管理题 高频考题)
根据民航局规定,考试申请需在考试日前至少5个日历日通过培训机构在UOM平台完成报名。
3. 多旋翼无人机飞行过程中螺旋桨出现积冰的原因?(空气动力学原理题)
螺旋桨出现积冰的主要原因是飞机在零度以下、含有过冷水滴的云层或降水中飞行,水滴撞击桨叶表面后瞬间冻结,形成积冰。
4. 风向315,航向135,飞机是怎么飞行的?(基础风向航向判断题,2026年常考题)
飞机是逆风飞行
解析:
– 风向:风的来向(风吹来的方向)
– 航向:飞机机头朝向(前进方向)
风向315°=西北风(风吹向东南)
航向135°=机头朝东南(往东南飞)
风向315°(来向)与航向135°(去向)正好相差180°,说明风正对着机头吹来。
5. 暂行条例规定的中型无人驾驶航空器的定义?(基础飞行原理题,高频考题)
最大起飞重量不超过150Kg,但不包括微型、轻型、小型无人驾驶航空器
2026年3月8日江苏02
1. BEC的含义?(基础硬件名词解释题 高频考题)
免电池电路
2. 视距内超视距申请执照考试时间要求?(基础法规考试管理题 高频考题)
根据民航局规定,考试申请需在考试日前至少5个日历日通过培训机构在UOM平台完成报名。
3. 多旋翼无人机飞行过程中螺旋桨出现积冰的原因?(空气动力学原理题)
螺旋桨出现积冰的主要原因是飞机在零度以下、含有过冷水滴的云层或降水中飞行,水滴撞击桨叶表面后瞬间冻结,形成积冰。
4. 美国手日本手通道英文?(基础操作遥控器设置类题 高频考题)
– 美国手:
– 左摇杆:油门(THR)、方向(RUD)
– 右摇杆:升降(ELE)、副翼(AIL)
– 日本手:
– 左摇杆:升降(ELE)、方向(RUD)
– 右摇杆:油门(THR)、副翼(AIL)
5. 暂行条例规定的中型无人驾驶航空器的定义?(基础法规定义题,高频考题)
最大起飞重量不超过150Kg,但不包括微型、轻型、小型无人驾驶航空器
2026年3月7日云南02
1. 6s22000mah,放电至20%,充电时间48min,求充电电流?
22000mAh=22Ah
充电电流=需充电容量(Ah)÷充电时间(h)
=22Ah × (1-20%) ÷ (48/60)h
=17.6 ÷ (4/5) =22A
2. 当前 15℃,3000m高度华氏度多少?(押中)
海拔高度每升高100米,温度下降0.65℃
15℃-(3000/100)×0.65℃=-4.5℃
摄氏度(℃)转华氏度(℉):℉=(℃×9/5)+32° =(-4.5℃×9/5)+32° =23.9℉
3. 以下关于电池的说法,哪组是正确的(E)
A. 10000mah电池1A充电,充电倍率是10C; ✘ 充电倍率=充电电流÷充电容量=1A÷10Ah=0.1C
B. 5000mah电池1A充电,2小时可以充满; ✘ 默认充电1C,5Ah×1C÷1A=5h
C. 单块电池容量为6000mah,3S2P电池组满电电压下提供的电压为 11.1V; ✘ 3S×4.2V=12.6V
D. 单块电池容量为6000mah,3S2P电池组满电下提供的容量24000mah; ✘ 12000mAh
E. 单块电池容量为6000mah,3S2P电池组存放电压为11.55V; ✔ LIPO存储电压3.8V-3.9V 3.85V×3S=11.55V
4. 四大阻力及减小方法?(押中)
四大阻力:摩擦阻力、压差阻力、诱导阻力、干扰阻力。
减小方法:
– 摩擦阻力:增加机身表面光洁,减少气流接触面积
– 压差阻力:机身做成流线型设计
– 诱导阻力:增大展弦比;加装翼梢小翼
– 干扰阻力:用整流罩包裹连接部;调整部件相对位置,减少气流冲突;
5. 《民用无人驾驶航空器实名登记和激活要求》《无人驾驶航空器系统运行识别规范》两个文件实施时间?(押中)
实施日期:2026-05-01
2026年1月13日河南04
1. 多旋翼翼尖线速度怎么计算的?
答:翼尖线速度(v)的计算公式非常直接:
线速度 V=w*r (w 为角速度,r 为半径)
2. 多旋翼有几个轴?分别是绕什么轴做什么运动?
答:三个轴,横轴(Y轴),纵轴(X轴),立轴(Z轴)
– 绕横轴做俯仰运动,沿横轴左右平移运动。
– 绕纵轴做滚转运动,沿纵轴前进后退运动。
– 绕立轴做偏航运动,沿立轴上升下降运动。
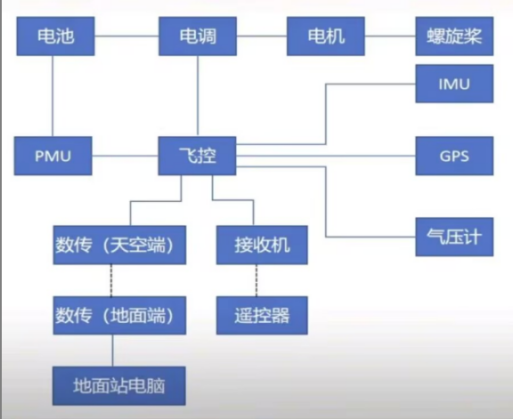
3. 遥控器与无人机间的核心通信链路有哪几条?分别是什么?
答:无人机有3条链路。
分别是:1 遥控器上行链路;2 图传下行链路;3 数传上下行链路。
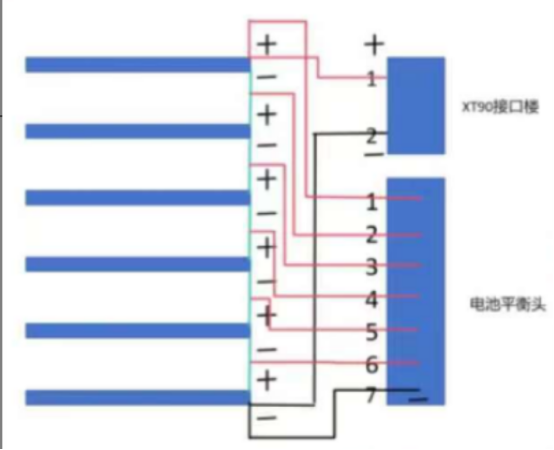
4. 电调速一般有几根线,分别连接什么?
答:电调通常有7根或者8根线;
其中:
– 2根最粗的红黑线连接动力电池为无人机提供电能;
– 3根中等粗细的线连接动力电机,将电池的直流电转换成交流电给电机供电,通过改变电压大小调整电机转速;改变电流大小调节电机扭矩;任意调整3根中的2根线可以改变电机的旋转方向;
– 剩余2-3根线为杜邦线连接飞控用来接收和反馈控制信号(其中3根线有一根是充当BEC给飞控供电)。
5. 《无人驾驶航空器飞行管理暂行条例》颁布日期?
答:无人驾驶航空器飞行管理暂行条例,自2024年1月1日起施行;
编号:国令第761号;成文日期:2023年5月31日;发布日期:2023年06月28日;
2026年1月12日河南04
1. CCW1552螺旋桨解释参数。
答:CCW:正桨,俯视俯视状态下螺旋桨逆时针旋转;
1552:15代表桨叶直径15英寸,38.1厘米(1英寸=2.54厘米)
1552:52代表桨叶螺距5.2英寸,13.2厘米(1英寸=2.54厘米)
2. 升力公式并解释含义。
答:升力公式 L=1/2ρV²S
– L:升力公式;
– 1/2:常数;
– C:升力系数(主要反应迎角和弯度);
– ρ:空气密度;
– V:飞机相对气流的速度,也叫真空速(旋翼机里指的是线速度=角速度×桨叶半径);
– S:升力面积(固定翼的升力面积主要来源于机翼,多旋翼升力面积主要来源于旋翼)。
3. 舵面遥控模式,姿态模式,GPS模式内外回路参与情况?
答:舵面遥控模式(纯手动模式):内外回路均不参与工作;
姿态模式:内回路参与工作,外回路不参与工作;
GPS模式(人工修正模式):内外回路均参与工作。
4. 16000mah 6s四轴旋翼机单轴耗电电流10A,求理论续航,电池最大电压,以5A充电,充满需要多久?
答:最大电压=4.2V×6=25.2V
理论续航=电池容量÷总电流=16Ah ÷ (4×10A)=0.4小时=24分钟;
充电时长=电池容量÷充电电流=16Ah÷5A=3.2小时=192分钟。
5. 四轴飞行器顶视逆时针如何实现向左旋转90度?
答:俯视状态下,CW顺时针旋转的螺旋桨加速,CCW逆时针旋转的螺旋桨减速。
2025年10月26日山西02
1. 飞机在飞行过程中动力饱和如何解决
轻柔打舵,应急返航
2. 电调有几根线分别是啥作用
7根,2根最粗的硅胶线一红一黑连接动力电池(电源线),3根较粗的硅胶线连接电机(电机驱动线),3根最细的杜邦线连接接收机或飞控(信号线)。
3. 飞机在飞行中机头与航向不否是啥么原因
磁罗盘故障
4. bec和esc的全称
esc全称电子调速器,bec全称免电池电路
5. 暂行管理条例多少章多少条以及飞机的分类
6章63条,无人机分类:轻型、微型、小型、中型、大型
2025年12月15日河北02
1.写出阻力公式?并写明在多旋翼模态下各个字母所代表的含义。(写错不得分)
D=1/2ρv²SCD;
D:空气阻力;
1/2:常数;
ρ:大气密度(单位kg/m³);
v:无人机与空气的相对速度 空速m/s
S:迎风面积
CD:阻力系数(与机身外形、机翼构型、飞行姿态相关)
核心规律:阻力与空速的平方成正比,空速提升会导致阻力急剧增大。
2.多旋翼以重量来分机型分别有几种?
微型:空机重量<0.25kg
轻型:空机重量≤4kg,最大起飞重量≤7kg(不含微型)
小型:空机重量≤15kg,最大起飞重量≤25kg(不含微型、轻型)
中型:最大起飞重量≤150kg(不含微型、轻型、小型)
大型:最大起飞重量>150kg
3.俯仰角、迎角、上升角、下滑角分别是什么意思?
俯仰角:机体坐标系纵轴/(x轴)与水平面的夹角
迎角:是指机翼翼弦与相对来流方向形成的夹角;
上升角:是指上升轨迹与水平面之间的夹角;
下滑角:指飞行器在下降过程中下降轨迹与水平面之间的夹角;
4.6S22000mAh电池还剩20%的电量,用2C充电,电流是多少?充电时间是多少?
充电电流 = 充电倍率 × 电池容量
22000mAh=22Ah,22Ah×2=44A
需充容量 = 电池总容量 ×(1 – 剩余电量比例)
22Ah×(1-20%)=17.6Ah
充电时间 = 需充容量 ÷ 充电电流17.6Ah÷44A=0.4h=24min
5.教学员的顺序
第一教油门,因为是起飞的基础;
第二教升降,因为起飞对尾,学习升降控制飞机保护自己;
第三教副翼,可以控制飞机在一定范围内;
最后教方向,结合其他通道完成动作。
2025年9月13日河南04
1.GPS的原理?
答:GPS即全球定位系统,核心是三边定位原理: 无人机上的GPS接收机接收至少4颗卫星的信号,获取卫星的位置坐标和信号传播的时间差;通过时间差计算出接收机到每颗卫星的距离(伪距); 以卫星为球心、伪距为半径作球面,多个球面的交点即为无人机的三维位置(经度、纬度、海拔); 同时结合卫星时钟校准,实现时间同步和速度、航向的测算。
2. 无人机和多旋翼的定义?
– 无人机:全称无人驾驶航空器,是指没有机载驾驶员操作,通过遥控或自主程序控制实现飞行的航空器,可分为固定翼、多旋翼、直升机等类型;
– 多旋翼无人机:属于无人机的一种,由三个及以上旋翼提供升力和动力,通过改变不同旋翼的转速实现姿态调整和飞行控制,常见的有四旋翼、六旋翼、八旋翼等,具有操作简单、悬停稳定的特点。
3. 教员执照怎么更新?
答: 执照有效期届满前,向CAAC或其授权机构提交更新申请;完成规定的继续教育培训(如教员复训课程、行业最新法规/技术培训),并通过考核;近2年内无重大飞行安全事故、违规教学记录;提交相关证明材料(培训结业证明、教学课时记录等),审核通过后完成执照更新。
4. IMU的5个作用?
答:IMU即惯性测量单元,核心作用包括:
检测角速度:通过陀螺仪感知无人机的滚转、俯仰、偏航角速度,判断姿态变化;
检测线性加速度:通过加速度计感知无人机的前后、左右、上下加速度,测算运动趋势;
姿态解算:结合陀螺仪和加速度计数据,实时解算无人机的飞行姿态(横滚角、俯仰角、航向角);
辅助导航:在GPS信号丢失时,通过惯性导航暂代定位,保证短时间内的飞行稳定性;
防抖修正:为飞控提供姿态数据,用于调整电机转速,实现无人机的精准悬停和飞行控制。
5. 一块28000毫安的电池,六个机臂,每条机臂20A,能飞行多久?
– 步骤1:单位换算,28000mAh = 28Ah;
– 步骤2:计算总放电电流,6×20A = 120A;
– 步骤3:飞行时间 = 电池容量 ÷ 总放电电流,28Ah ÷ 120A ≈ 0.233h = 14分钟(结果取近似值);
– 答案:约14分钟。
2025年新疆03考点
1. 常用的螺旋桨,是什么材质?各有什么优点?(最少3种)
答:- 塑料(尼龙/玻纤尼龙):成本低、重量轻、韧性好,轻微碰撞不易断裂,适合入门级无人机和训练使用;
– 碳纤维:强度高、刚性好、重量极轻,气动效率高,能提升无人机续航和机动性能,适合专业航拍、竞赛无人机;
– 木质:材质轻、气动性能优异,手工定制性强,适合航模改装和特殊飞行需求,但抗冲击性差、易损坏。
2. ESC的全称?有几根线,连接哪些部件?
答:- ESC全称:Electronic Speed Controller,即电子调速器;
– 线路数量及连接部件:
– 电源线(2根,正负极):连接电池,获取供电;
– 电机线(3根):连接电机,控制电机转速;
– 信号线(1根):连接飞控/接收机,接收油门控制信号;部分电调还带有BEC线(5V/12V输出),为飞控、接收机等供电。
3. 多旋翼无人机在飞行过程中出现动力饱和该如何做应急处理?
答: 立即减小飞行负载(如抛投任务载荷,若有),降低无人机动力需求;
迅速调整飞行姿态,减小爬升角度、降低飞行速度,避免大机动动作;
若处于高海拔/高温环境,尽快向低海拔/温度较低区域飞行,提升电池和电机效率;
若动力饱和导致高度持续下降,就近选择平坦开阔区域迫降,避免坠机事故。
4. 教员等级更新应满足哪些条件?
答:持有有效的无人机教员合格证,且在有效期内提出更新申请;
完成规定的继续教育培训(如CAAC认可的教员复训课程),并通过考核; 近2年内无重大飞行安全事故、违规操作记录;具备持续的教学能力,完成规定的教学课时量(具体以CAAC最新规定为准)。
5. 多旋翼视距内和超视距学员满足哪些条件可以申请参加对应等级的考试?
答:- 视距内学员考试申请条件:
1. 年满16周岁,无妨碍飞行的疾病;
2. 完成CAAC认可的视距内驾驶员培训课程,且课时达标;
3. 通过培训机构的结业考核,理论知识、实操技能达到考试标准。
– 超视距学员考试申请条件:1. 年满18周岁,无妨碍飞行的疾病;
2. 取得视距内驾驶员合格证,或直接完成超视距驾驶员培训课程且课时达标;
3. 掌握超视距飞行相关的理论知识(如航空法规、气象、链路通信等)和实操技能;
4. 通过培训机构的结业考核,满足CAAC规定的超视距飞行训练要求。





暂无评论内容