

2026年4月29日安徽01
1.旋翼飞行器在考试过程中随着风力大小,考试标准分别为几个等级具体是根据多大的风速来评定的,每个等级考试标准有什么变化?
0-4米/秒为1级、4-8米/秒为2级、8米/秒以上为3级。随着标准每增加1级允许的误差相比前一等级增加15%。
2.旋翼飞行器视距内、超视距操控员的水平8字的考核标准是什么?
8字航线单圈直径为12米,航空器水平位移误差不超过±2米,垂直位移误差不超过±1米,航空器位移无卡顿,航向与标准航线切线夹角不超过30°。
3.电动无人机动力系统有哪些部件,都有什么作用?
动力电池:提供动力电源
电机:直流电转交流电,调节电机转速,带BEC功能的给飞控供电
无刷电机:通过转速控制推力或推力
桨叶:提供升力
4.法规规定的旋翼飞行器小型、中型和大型机型,起飞重量分别是多少?
答:
微型无人机:空机重量和起飞重量均为0.25kg,最大飞行高度不超过50米,最大平飞速度不超过40千米/小时,无线电发射设备需符合相应功率要求。
轻型无人机:空机重量大于0.25kg且不超过4kg,起飞重量大于0.25kg且不超过7kg,最大平飞速度不超过100千米/小时,需具备符合空域管理要求的空域保持能力和可被监视能力。
中型无人机:空机重量大于4kg且不超过15kg,起飞重量大于7kg且不超过25kg,需具备符合空域管理要求的空域保持能力和可被监视能力。
大型无人机:空机重量大于15kg且不超过150kg,起飞重量大于25kg且不超过150kg。
大型无人机:空机重量超过150kg。
5.常见电池的标准电压和满电电压?(必须写出四个含)以上
答:1. LIPO(锂聚合物电池):标称电压为3.7V,单节电池电压为4.2V,是航模、无人机领域最常见的电池类型。
2. Ni-MH(镍氢电池):标称电压为1.2V,单节电池电压为1.5V,常用于遥控器、玩具等设备。
3. LiIY(高能量电池):标称电压为3.8V,单节电池电压为4.35V,属于高倍率电池,能量密度更高,对充电器要求也更高。
4. Ni-Cd(镉电池):标称电压为1.2V,单节电池电压为1.75-1.8V,因存在记忆效应且环保性较差,目前使用场景较少。
2026年4月26日重庆02
1、电池计算题
2、海拔高度和真实高度定义,解释海拔高度、真实高度,相对高度的含义并举例出一个传感器?
答:海拔高度:也叫绝对高度,是指飞行器飞行的水平面到平均海平面(大地水准面)的垂直距离。测量传感器:GPS(卫星定位获取绝对海拔)。真实高度:是指飞行器距离其正下方地面的实际垂直高度,也叫离地高度。测量传感器:激光测距传感器(或超声波传感器)相对高度:是指飞行器相对于起飞点或某一指定水平面的垂直高度。测量传感器:气压高度计(通过气压变化计算与起飞点的高度差)
3、高原地区为什么用双叶桨,不用三叶桨?
答:高原空气稀薄,三叶桨阻力大、效率低、必须更高转速才够拉力,结果是:更耗电、续航短、电机易过热降功、甚至炸机。而大直径小螺距双叶桨,用更低转速就能产生足够拉力,效率高、省电、稳定、电机压力小,更适合高原环境。
4、三轴六自由度
答:三个轴分别为纵轴x横轴y立轴z;六个自由度分别为(以美国为例):右手上下操作升降舵,飞机沿纵轴做前后运动,绕横轴做俯仰运动;右手左右操作副翼,飞机沿横轴作左右平移运动,绕纵轴做滚转运动;左手上下操作油门,飞机沿立轴做上升或下降运动;左手左右操作方向舵,飞机绕立轴做向左或向右偏航运动
5、OC,RC,TC,AC中文连线
OC:运营合格证;PC:生产许可证;AC:单机适航证;TC:型号合格证
2026年4月21日广东01
1.liipo电池,标称电压22.2V,容量6800mah,求额定能量?能否带上飞机?
答:额定能量=22.2×6.8=150.96Wh < 160Wh
可以携带
2.空速是什么速度是什么,以及空速地速风速之间的关系?
答:空速:无人机相对于周围空气的运动速度;
地速:无人机相对于地面固定参考点的运动速度;
V地速=V空速+V风速
3.内外回路定义
答:内回路是指飞行控制系统中的一个闭合控制回路,主要用于姿态控制和稳定性增强;
外回路是接收用户飞行指令和位置/速度传感器反馈,输出目标姿态角给内回路,实现无人机位置、速度、航迹宏观控制的上层闭合控制回路。
内回路的作用是:维持无人机姿态稳定;
外回路的作用是:实现无人机的定位与导航。
4.沿纵轴、横轴、立轴做什么运动?
答:
沿纵轴做前后向运动:绕纵轴做滚转运动;
沿横轴做左右水平移动:绕横轴做俯仰运动;
沿立轴做上下升降运动:绕立轴做偏航运动;
5.OC PC AC TC解释。
答:
OC:运营合格证
PC:生产许可证
AC:单机适航证
TC:型号合格证
26年3月28日安徽01
1.6slp 16000mah最大放电25C充电5C 使用15分钟后降落,电池只剩20%,求八旋翼单个电机平均放电电流?
![图片[1]-彭龙口试真题-更炽热无人机CAAC执照备考](https://caac.hotteruav.cn/wp-content/uploads/2026/04/image-46.png)
2.经纬度划分,分别从哪里开始?
答:纬度划分从赤道开始;经度划分本初子午线开始;
3.内外回路作用?
答:内回路主要负责飞行器的姿态控制,确保飞行稳定;
外回路主要负责轨迹控制,引导飞行器按照预定路线飞行。
内外回路同时工作的时候无人机处于GPS模式;
4.电机8820 100kv桨叶3011 CCW,各参数的含义?
答:电机:88:代表电机定子线圈直径88mm;
20:代表电机定子线圈高度20mm;
100KV:代表每增加1V电压,电机在空载状态下,每分钟增加的转速为100转/分(r/min);
桨叶:30:代表桨叶直径是30英寸;
11:代表桨叶螺距是11英寸:
1英寸=2.54cm=25.4mm;
CCW:正桨代表俯视状态下,桨叶逆时针旋转;
5.适飞空域高度是多少米,小型中型有没有适飞歪域?
答:适飞空域真高不超过120米;
适飞空域:管制空域以外的空域为微型、轻型、小型无人驾驶航空器的适飞空域;
所以,小型无人驾驶航空器有适飞空域;中型无人驾驶航空器没有适飞空域;
2026年2月27日浙江01
1、4块6S 1000MAH锂电池,放电倍率100C,求串联并联最大电流和电压?
参考答案:并联增容增流不增压、串联增压不增流不增容
– 串联:
最大放电电流=电池组容量×放电倍率=1AH×100C=100A
满电电压=单片电芯的满电电压×电池串联数=4.2V×4×6=100.8V
– 并联:
最大放电电流=电池组容量×放电倍率=1AH×4×100C =400A
满电电压=单片电芯的满电电压×电池串联数=4.2V×6=25.2V。
2、无人机超视距考核标准?通用要求?
参考答案:
考核项目 考核要求 通用要求
1 起飞 油门操纵均匀,姿态正常 无危险动作与姿态,操作柔和,航空器部件完好
2 悬停 水平位移不超过±2米,垂直位移不超过±1米
3 慢速水平偏转360° 水平位移误差不超过±2米,垂直位移误差不超过±1米,方向偏转无卡顿,项目考核时间为5至30秒内。
4 水平8字 依据航空器性能确定标准航线单个圆直径(小、中型:12米),航空器水平位移误差不超过±2米,垂直位移误差不超过±1米,航空器位移无卡顿,位移速度无明显变化,航向与标准航线切线夹角不超过30°
5 定点降落 到达降落点后匀速下降,平稳降落。
3、自己训练的无人机测量高度和速度的传感器?
参考答案:以汉鲲为例
– 高度传感器:
气压高度计——测量相对高度;
GPS——测量海拔高度。
– 速度传感器:
GPS——测量地速。
4、轴距是什么?表现飞机的什么特性?
参考答案:指对角线两个螺旋桨中心的距离,单位通常是毫米。
决定了飞机的物理大小,螺旋桨的尺寸,进而影响飞机的载重能力、抗风等级和飞机的机动性等。
5、螺旋桨9450的参数含义?CW和CCW是什么?
参考答案:
– CW为反桨,俯视旋转方向为顺时针旋转;
– CCW为正桨,俯视旋转方向为逆时针旋转;
– 94是螺旋桨桨叶的直径,9.4英寸;
– 50是螺旋桨的螺距,5.0英寸;
– 一英寸=25.4mm。
2026年2月10日湖北04
1、X型气动布局四轴四旋翼无人机,俯视右上角螺旋桨为CCW,无人机姿态做下列改变时,请标出各旋翼的加减速变化?(加速请填“+”,减速请填“-”,本题1分,错填漏填不得分)?
参考答案:
左上桨叶 右上桨叶 左下桨叶 右下桨叶
后仰 + + – –
右滚转 + – + –
左偏航 + – – +
右偏航 – + + –
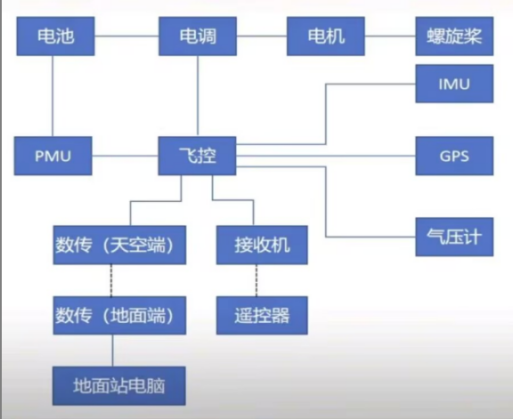
2、连线题:电池、电调、电动机、PMU、飞控、GPS、接收机、数传电台?
参考答案:
电池 → 电调 → 电动机
电池 → PMU → 飞控
飞控 → GPS
飞控 → 接收机
飞控 → 数传电台
3、计算题:6S2P,22000MAH(单片),8旋翼每个机臂电流为10A,求该飞机理论航时?电池电量剩余50%时,以0.5C倍率充电,多久能够充满?
参考答案:并联增容增流不增压、串联增压不增流不增容
理论续航时间=电池组容量÷总耗电流
=22AH×2÷(10A×8)=0.55H=33min
充电电流=电池组容量×充电倍率
=22AH×2×0.5C=22A
充电时间=所需充电的电池组容量÷充电电流
=22AH×2×(1-50%)÷22A=1H=60min
4、以下哪些经纬度的组合是错误的?(本题多选题,1分,答错,少选不得分)
A、S70°33′18″ W120°33′34″
B、E50°12′1″ W77°34′12″
C、N60°20′13″ S50°18′18″
D、N100°10′10″ W90°48′27″
E、S50°13′14″ E50°19′17″
F、N93°11′58″ E60°14′17″
参考答案:纬度分为北纬和南纬,它们的范围在0°-90°之间;
经度分为东经和西经,它们的范围在0°-180°之间;
经纬度组合必须有一个经度一个纬度:
B选项是由东经和西经组成的,C选项是由北纬和南纬组成的,D选项北纬超过了90°,F选项北纬超过了90°,所以经纬度组合错误的是B、C、D、F。
5、暂行管理条例在第几章第几条中根据重量分类为哪些类?
参考答案:第六章 第六十二条
微型、轻型、小型、中型、大型。
2026年1月27日浙江01
1、经纬度计算
答:经纬度度分秒换算度的方法:宽+分÷60+秒÷3600;
例:113°10′28″ =113°+10’÷60+28″ ÷3600=113.17444444
2、理论有效期、实践考试有效期、理论补考间隔、实践补考间隔?
答:理论考试通过后有效期不超过24个日历月;
实践考试科日通过后有效期不超过60个日历日;
理论补考间隔不少于28个日历日;
实践补考间隔不少于14个日历日。
3、LIP0和LIHV中文意思,标称电压和满电电压分别是多少?
答:LIPO(锂聚合物电池):标称电压3.7V,满电电压:4.2V;
LIHV(锂离子聚合物高压电池):标称电压3.8V,满电电压:4.35V。
4、写出四大阻力、废阻力、总阻力与速度的关系?
答:四大阻力有:压差阻力、摩擦阻力,干扰阻力、诱导阻力;
废阻力有:压差阻力、摩擦阻力,干扰阻力;
随着无人机速度的增加,无人机总阻力先减小后增大;
当废阻力等于诱导阻力时,总阻力达到最小值。
5、桨叶直径30cm、1000r/min,求线速度m/s?
答:用角速度公式
线速度v=角速度のx半径r=2πn*r=2π*(1000r/60s)*0.15m≈15.7m/s
2026年1月26日重庆02
1.22Ah,放电至 20%,充电时间 48 分钟,求充电电流?
答:\begin{align*}
\text{充电电流(A)} &= \text{需充电容量(Ah)} \div \text{充电时间(h)} \\
&= \left[22\text{Ah} \times (1-20\%)\right] \div 0.8\text{h} \\
&= 17.6\text{Ah} \div 0.8\text{h} \\
&= 22\text{A}
\end{align*}
3.飞机的高度速度,传感器是哪些?
答:- 高度传感器:GPS、气压高度计、超声波传感器、红外传感器、毫米波雷达、激光高度传感器、光流传感器、视觉传感器
– 速度传感器:GPS、IMU(惯性测量单元)、光流传感器、视觉传感器、多普勒雷达等
4.BEC、PMU、ESC 含义?
答:- BEC:免电池电路(Battery Elimination Circuit)
– PMU:电源管理模块(Power Management Unit)
– ESC:电子调速器(Electronic Speed Controller)
5.下行链路失控,如何处理?
答:无人机下行链路中断时,地面站软件上的飞行状态和数据不再更新:
1. 首先尝试重新连接下行链路;
2. 无人机在视距内应尽快遥控着陆;
3. 无人机在视距外应发送指令,等待飞机返航;
4. 个别情况下,可依靠任务设备图像返航。
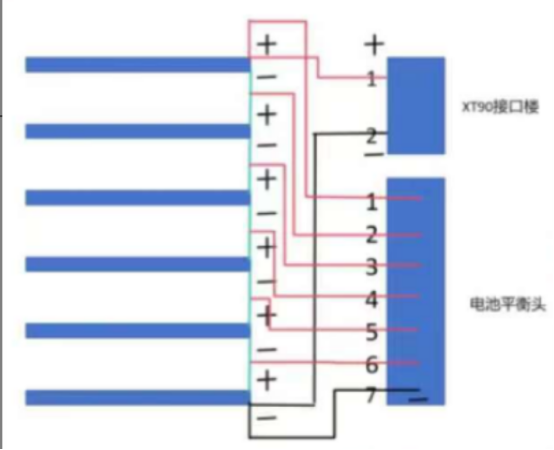
6.电调几根线,作用?
答:电调通常有 7 根或者 8 根线:
– 其中 2 根最粗的红黑线连接动力电池,为无人机提供电能;
– 3 根中等粗细的线连接动力电机,将电池的直流电转换成交流电给电机供电,通过改变电压大小调整电机转速;改变电流大小调节电机扭矩;任意调整 3 根中的 2 根线可以改变电机的旋转方向;
– 剩余 2-3 根线为杜邦线,连接飞控用来接受和反馈控制信号(其中 3 根线有一根是充当 BEC 给飞控供电)。
2026年1月24日江西02
1、多旋翼的螺旋桨与什么相似?为什么各半径位置线速度和迎角不一样?
参考答案:多旋翼的螺旋桨是定距螺旋桨,和固定翼飞机的螺旋桨更相似;
线速度不一样是因为线速度等于角速度乘半径,螺旋桨各处的角速度是一样的,所以越靠近桨毂处的线速度越小,越远离桨毂处的线速度越大。迎角不一样是为了保证螺旋桨各点处的升力处处相等。
2、LIIV单片电芯满电电压是多少?
参考答案:LIHV是锂离子聚合物高压电池,满电电压4.35V。
3、俯视右上角螺旋桨CCW,无人机做向后仰、向右滚转、向左偏航、向右偏航,改变时四个桨的加减速变化?
参考答案:
左上桨叶 右上桨叶 左下桨叶 右下桨叶
后仰 + + − −
右滚转 + − + −
左偏航 + − − +
右偏航 − + + −
4、连线题,PMU、IMU、GPS、LED、电池、电机、电调、飞控、接收机?
参考答案:
电池 → 电调 → 电机
电池 → PMU → 飞控
飞控 → IMU
飞控 → 接收机
飞控 → LED
飞控 → GPS
5、理论考试缺考需要间隔多少天?理论考试补考需要多少天?实践考试补考需要间隔多久?
参考答案:
理论考试申请人有缺考记录的,再次申请任何考试日期与缺考日期间隔最少为28个日历日;
理论考试申请人成绩未达到考试通过分数,需要重新申请考试的视为补考,补考日期与上一次同科目考试日期间隔最少为28个日历日;
实践考试申请人有缺考记录的,再次申请任何考试日期与缺考日期间隔最少为14个日历日;
实践考试申请人实践考试未通过的,需要重新申请考试的视为补考,可以在考试结束后14个日历日后申请补考。
2025年12月21日广东01
1. 22000mah剩20%电量,充满用时48分钟,得用多少A?
答:充电电流=需充电池容量÷充电时间=【22Ah×(1-20%)】÷(48min/60) =22A;
2. IMU,PMU,电机,电调,电池,飞控,GPS,LED,数传电台连线?
(连线关系:电池连接电调、PMU;电调连接电机、飞控;PMU连接飞控;飞控连接LED、IMU、GPS、数传电台)
3.什么是子午线?
答:子午线也称经线,和纬线一样是人类为度量方便而假设出来的辅助线,定义为地球表面连接南北两极的大圆线上的半圆弧。
4. 多旋翼的桨叶和飞行器相似,为什么桨叶各点的速度和迎角不相等?
答:多旋翼的 螺旋桨从结构和工作原理上来说,更接近与固定翼飞机的螺旋桨;
原因:①线速度差异:螺旋桨各半径处转动半径不同,线速度v=ω×r(ω为角速度,r为半径),半径越大线速度越大;
②迎角差异:螺旋桨为扭转设计,由于不同半径处线速度不同,为保证各截面产生均匀升力,需通过扭转调整迎角(半径越大处迎角越小,抵消线速度增大带来的升力增量)
5. 下行链路中断,会发生什么,怎么处理?
答:无人机下行链路中断地面站软件上的飞行状态和数据不再更新。
1、首先尝试重新连接下行链路;
2、无人机在视距内应尽快遥控着陆;
3、无人机在视距外应发送指令,等待飞机返航;
4、个别情况下,可依靠任务设备图像返航;
2025年12月13日广东06
1、桨叶噪音过大,怎么处理?
答:首先确保桨叶无破损、变形或污损(如卡入异物),定期检查并紧固连接件,避免松动引发额外振动;其次在确保桨叶正常的情况下,可通过加装减振装置、优化运行参数(如降低转速)或更换高性能桨叶来改善。
2、无人机在飞行中剧烈晃动,反应滞后,除了飞控感度的原因,还有什么原因?
答:1、多旋翼飞行器机臂刚度不够,或有安装旷量;
2、多旋翼机体太大致使转动惯量太大;
3、多旋翼螺旋桨太重,加减速慢致使操纵相应慢;
4、固定翼机体或舵面刚度不够,连杆、摇臂或舵机本身有旷量;
5、桨叶与电机的精密配合失衡:单侧桨叶磨损、裂纹或安装角度偏差会导致旋转时离心力不对称,形成周期性振动;电机安装角度的微小偏差也会导致升力方向偏移,引起机身侧倾;
6、环境干扰:复杂风场和电磁干扰会影响无人机的稳定性;
7、系统参数失调:惯性测量单元(IMU)的温度漂移和PID控制器参数设置不当会导致姿态解算出现系统性偏差或无人机对姿态调整过度反应,形成过冲-回调的振荡模式。
3、以大疆无人机为例,它的这个机臂前后灯的颜色?如何调整电调灯?
答:机臂灯前红后绿打开LED灯盖,有三个拨动开关,三个拨动开关不同ON和OFF位置组合呈现不同的颜色。
4、视距内,超视距,教员,考试题目数量,时间,及格分数,单题分数
答: 视距内驾驶员:理论考试时间120分钟、100道题、每题1分、70分及格;
超距内驾驶员:理论考试时间120分钟、100道题、每题1分、80分及格;
教员:理论考试时间60分钟、40道题、每题2.5分、80分及格。
5、12S16000mah锂电池(普压),满电电压是多少?最最小安全电压是多少?标称电压是多少,以0.5C充电,充电时间是多少?
答:满电电压=12×4.2V=50.4V;
最小安全电压=12×3.6V=43.2V;
标称电压=12×3.7V=44.4V;
充电时间=电池组容量÷充电电流=16Ah÷(16Ah×0.5C)=2h=120min
2025年11月6日广东03
1、GNSS、GCS中文简称?
参考答案:GNSS:全球导航卫星系统;GCS:地面站。
2、10000MAH10C(2C),剩余20%的电量充满,需要多久时间?最大放电电流是多少?
参考答案:充电时间=所需充电的电池容量÷充电电流=10000MAH×(1-20%)÷(10000MAH×2C)=0.4h=24min;
最大放电电流=电池组容量×放电倍率
=10000MAH×10C=100A。
3、2212无刷电机,400KV,6T含义?
参考答案:22是电机定子线圈的直径,单位毫米;
12是电机定子线圈的高度,单位毫米;
6T是电机定子线圈的匝数;
400KV指电压每增加1V,电机在空载的情况下转速增加400转/分钟。
4、写出四个测量高度的传感器?
参考答案:GPS、气压高度计、激光测距雷达、视觉传感器、超声波传感器。
5、CW是什么桨?哪个方向旋转?
参考答案:CW是反桨,在俯视状态下顺时针旋转。
2025年11月6日广东03
1、GNSS、GCS中文简称?
参考答案:GNSS:全球导航卫星系统;GCS:地面站。
2、10000MAH10C(2C),剩余20%的电量充满,需要多久时间?最大放电电流是多少?
参考答案:充电时间=所需充电的电池容量÷充电电流=10000MAH×(1-20%)÷(10000MAH×2C)=0.4h=24min;
最大放电电流=电池组容量×放电倍率
=10000MAH×10C=100A。
3、2212无刷电机,400KV,6T含义?
参考答案:22是电机定子线圈的直径,单位毫米;
12是电机定子线圈的高度,单位毫米;
6T是电机定子线圈的匝数;
400KV指电压每增加1V,电机在空载的情况下转速增加400转/分钟。
4、写出四个测量高度的传感器?
参考答案:GPS、气压高度计、激光测距雷达、视觉传感器、超声波传感器。
5、CW是什么桨?哪个方向旋转?
参考答案:CW是反桨,在俯视状态下顺时针旋转。
2025年11月6日广东03
1、写出四大全球卫星导航系统,并写出所属国家或地区?
参考答案:①美国的全球定位系统(GPS);
②中国的北斗卫星导航系统(BDS);
③俄罗斯的格洛纳斯卫星导航系统(GLONASS);
④欧盟的伽利略卫星导航系统(GALILEO)。
2、实践考试有效期多久?实践未通过多长时间能补考?
参考答案:实践考试有效期不超过60个日历日;
实践未通过补考时间间隔不少于14个日历日。
3、飞控三大算法?
参考答案:捷联式惯性导航系统、PID算法、卡尔曼滤波算法。
4、电池、电调、电机、PMU、飞控、接收机、GPS连线?
参考答案:
电池——电调——电机
电池——PMU——飞控——接收机
飞控——GPS
5、6S10000MAH充电倍率2C,单片电芯的容量是多少?剩余20%的电量,用10A充电电流,理论充电时间是多少?
参考答案:串联增压不增流不增容
单片电芯的容量是10000MAH
理论充电时间=所需充电的电池容量÷充电电流
=10AH×(1-20%)÷10A=0.8H=48min。





暂无评论内容