
2026年4月20日山东04
1.16000mah6s,八旋翼,单个机臂电流10A,放电50%,耗时多久?以8a电流充满需要多久?
答:计算总电流:八旋翼无人机有8个机臂,每个机臂电流为10A,因此总电流为:10A/臂 × 8臂 = 80A
计算消耗的电量:电池容量为16000mAh(即16Ah),放电50%所消耗的电量为:16Ah × 50% = 8Ah
计算耗电时间:用消耗的电量除以总电流,即可得到耗电时间:8Ah ÷ 80A = 0.1小时
换算成分钟为:0.1小时 × 60分钟/小时 = 6min
以8A的电流将电池从50%的电量充满,需要补充8Ah的电量(即总容量的50%)。
计算耗电时间:用消耗的电量除以充电电流:8Ah ÷ 8A = 1h = 60min
2.经纬度选择题
答:经纬度取值范围及换算,数值范围:北纬(N)/南纬(S)0°~90°;东经(E)/西经(W)0°~180°;换算公式:十进制数÷60+30=3600;度分秒=整数部分(度)+小数部分×60(分)+剩余小数×60(秒)
3.有刷电机、无刷电机、有刷调速、无刷调速
有刷电机–有刷调速
无刷电机–无刷调速
4.右上ccw为1号电机,逆时针依次为2,3,4。向右旋转,哪个加速?哪个减速?
答:2.3加速,1.4减速
5.学习的四个要素?
答:内驱力、线索、反应、强化。
2026年4月13日山东05
1. 考空机定义,电动无人机空机质量包不包含电池
答:空机质量是指无人机不包含任务载荷和燃料的重量,包含电池、燃料容器等本体固态装置的重量总和。
2. 1.Throttle not calibrated;2.Accelerometer not calibrated;3.Compass not calibrated 的解决办法
答:1. Throttle not calibrated(油门未校准)
校准遥控器油门通道行程。
确保解锁时油门摇杆处于最低位(微调归零)。
检查电调油门行程是否校准。
2. Accelerometer not calibrated(加速度计未校准)
执行加速度计校准(将飞控水平放置,按地面站提示进行六面或静止校准)。
检查飞控减震是否过软或过硬。
重启飞控,若持续出现则可能硬件故障。3. Compass not calibrated(罗盘未校准)
执行磁罗盘校准。
远离磁场干扰源。
检查GPS/罗盘模块连接是否正常。
3. 开源飞控各插口名称和连接部件(Pixhawk RadioLink飞控)需要记好每一个接口对应的文字
4. X型气动布局四抽四旋翼无人机,以model-日本手为例俯视右上角螺旋桨为CCW无人机姿态做下列改变时,请标出各旋翼的加减速变化(加速请填”+”,减速请填”-“,本题1分,错填漏填不得分)
日本手 左上桨叶 右上桨叶 左下桨叶 右下桨叶
左手前推 – – + +
右手左推 – + – +
左手右推 – + + –
右手拉杆 – – – –
5.每分钟转速1000,桨叶半径36厘米,求线速度?
答:线速度=角速度×半径=2πn×r=2×3.14×1000转/60S×0.36m=37.68m/s;
2026年4月10日四川01
1.相对高度的定义
答:相对高度:是指飞机到指定的水平面的垂直距离;使用气压传感器测量;
2.过充的定义,会导致什么后果?
答:定义:充电时的电压/电量超过了电池的设计上限,仍然继续充电。
后果:①鼓包变形;②容量永久衰退;③发热严重;④漏液、腐蚀;⑤起火、爆炸
3.X型气动布局四抽四旋翼无人机,以model-日本手为例俯视右上角螺旋桨为CCW无人机姿态做下列改变时,请标出各旋翼的加减速变化(加速请填”+”,减速请填”-“,本题1分,错填漏填不得分)
日本手 左上桨叶 右上桨叶 左下桨叶 右下桨叶
左手前推 – – + +
右手左推 + – +
右手拉杆 – – – –
左手右推 – + + –
4.LIPO 6S 20000mAh 25C 5C电池,飞行15min后剩余20%电量,八旋翼无人机,求单个电机平均放电电流?
答:总充电电流=所充容量÷充电时间=[20Ah×(1-20%)]÷(15÷60)h=64A
单个电机平均放电电流=总充电电流÷总电机数量=64A÷8=8A
5.无民事行为能力人、限制民事行为能力人,违反《无人驾驶航空器飞行管理暂行条例》规定操控民用无人驾驶航空器飞行的怎样处理?
答:根据《无人驾驶航空器飞行管理暂行条例》
第五十条 无民事行为能力人、限制民事行为能力人违反本条例规定操控民用无人驾驶航空器飞行的,由公安机关对其监护人处500元以上5000元以下的罚款;情节严重的,没收实施违规飞行的无人驾驶航空器。
2026年4月6日广东03
1.4块6S 1000mah的Lipo,电池放电倍率100C,充电倍率2C,将这四块电池进行连接构成一个电池组,求该电池组最大瞬时放电功率是多少?
答:将4块6S电池进行串联:24S1P
最大放电功率=电池组最大电压×最大放电电流=(4.2V×24)×(1Ah×100C)=10080W
将4块6S电池进行并联:6S4
最大放电功率=电池组最大电压×最大放电电流=(4.2V×6)×[(1Ah×4)×100C=10080W
2.依据《无人驾驶航空器飞行管理暂行条例》,民用无人驾驶航空器未经实名登记实施飞行活动的将受到何种处罚?
答:民用无人驾驶航空器未经实名登记实施飞行活动的,由公安机关责令改正,可以处200元以下的罚款;情节严重的,处2000元以上2万元以下的罚款。
涉及境外飞行的民用无人驾驶航空器未依法进行国籍登记的,由民用航空管理部门责令改正,处1万元以上10万元以下的罚款。
3、写出4旋翼无人机遥控器在做相应操作时,舵面的相应动作(填+或者一,漏写,错写,均不得分)
日本手 右前CCW 左前CW 右后CW 左后CCW
左手推杆 – – + +
右手左打 + – + –
左手右打 + – – +
右手拉杆 – – – –
4、飞控调参中的PITCH,ROLL,YAW,Thrott1e分别代表什么(此题1分,漏写,错写,均不得分)
答:YAW:代表偏航角/方向感度;
PITCH:代表俯仰角/方向感度;
ROLL:代表滚转角/方向感度;
Throttle:油门;
5、用升力公式分析,使用高升力翼型是改变了哪个参数来改变升力大小,假设其他参数未变。(此题1分,答错不得分)
答:翼型本身无法改变空气密度、飞行速度或机翼面积,只能通过优化自身形状来提升升力系数,进而增大升力。
2026年3月25日重庆02
1. AIL, ELE, THR. RUD的中文?
答:ELE:升降;AIL:副翼;THR:油门;RUD:方向;
2. 1000转速/分钟,直径30厘米求线速度?
答:线速度=角速度×半径=2πn×r=2×3.14×1000转/60S×0.15m=15.7m/s;
3. X型气动布局四抽四旋翼无人机,以美国手为例俯视右上角螺旋奖为CCW无人机姿态做下列改变时,请标出各旋翼的加减速变化(加速请填”+”,减速请填”-“,本题1分,错填漏填不得分)
左手右压杆 – + + –
左手左压杆 + – – +
右手顶杆 – – + +
右手拉杆 + + – –
4. 6S20000AMH电池25C,5C,运行15分钟还剩10%,求8旋翼单个电机的平均电流?
答:单个电机的平均放电电流=总的放电电流÷8=(已消耗电池容量÷消耗容量所用时间)÷8=(20Ah×(1-10%))/(15min/60) × 1/8=20Ah×0.9×60/15×1/8=9A
5. 哪些飞机进行融合飞行无需经空中交通管理机构批准?
答:(一)微型、轻型无人驾驶航空器在适飞空域内的飞行;
(二)常规农用无人驾驶航空器作业飞行活动。
2026年3月23日江西02
1、内外回路设备有哪些?
内回路设备:陀螺仪、加速度计、imu、三轴磁力计
外回路设备:GPS模块、磁罗盘、空速传感器、光流传感器
2、适飞空域高度是多少米,小型中型有没有适飞空域?
适飞空域真高不超过120米;
适飞空域:管制空域以外的空域为微型、轻型、小型无人驾驶航空器的适飞空域;
所以,小型无人驾驶航空器有适飞空域;
中型无人驾驶航空器没有适飞空域
3、6s1p电池,22000mah,30C 5C,飞行15分钟还剩电量20%,求八旋翼单个电机的电流?
电池容量:22000mAh = 22Ah
飞行时间:15分钟 = 0.25h
实际用电量:100% – 20% = 80%
总放电电流:22×0.8÷0.25 = 70.4A
单个电机电流:70.4÷8 = 8.8A
4、解释相对,海拔,真实高度的含义并举例出一个传感器?
海拔高度:也叫绝对高度,是指飞行器飞行的水平面到平均海平面(大地水准面)的垂直距离。
测量传感器:GPS (卫星定位获取绝对海拔)
真实高度:是指飞行器距离其正下方地面的实际垂直高度,也叫离地高度。
测量传感器:激光测距传感器(或超声波传感器)
相对高度:是指飞行器相对于起飞点或某一指定水平面的垂直高度。
测量传感器:气压高度计(通过气压变化计算与起飞点的高度差)
5、电调80A、6s-12s、Lipo、BEC5.2-8.0V/10A、参数什么意思?(写错漏写不给分)?
80A:表示电调持续、稳定工作电流80A
6-12S:表示电调可以使用由3-6节电芯串联组成的锂聚合物电池,对应的电压范围通常为22.2V-44.4(1S=3.7V);
BEC 5.2-8.0V/10A:表示该电调具备内置的免电池电路(BEC)功能,能够将输入的电池电压转换为稳定直流电的范围5.2V到8.0V之间,并提供10A的电流输出;
2026年2月6日山西03
1. 超视距考试慢速水平偏转360°水平位移误差不超过(±2)米,垂直位移误差不超过(±1)米,项目考核时间为(5~30)秒内;水平8字考试速度偏差(0.3~3m/s),水平位移误差不超过(±2)米,航向误差是(≤30°)
2. 6S2P 16000mAh电池,25C 5C,飞行10分钟,用了20%的电,八旋翼求单个电机的平均电流?
16000mAh=16Ah
总放电电流=电池已使用容量÷放电时间=(16Ah×20%)÷(10min/60min)=19.2A
单个电机平均放电电流=总放电电流÷8=19.2A÷8=2.4A
3. 某电调160A、Lipo,3s-6S,BEC,HV,4.2-5.8v/10A,Lipo解释含义?
160A、Lipo:“160A”表示电调持续稳定工作的最大电流为160A,瞬时峰值电流320A,(没问瞬时峰值电流,这句其实可以不写。瞬时峰值电流是电调短时间(毫秒级)可承受的最大冲击电流,一般为持续电流的2倍)适用于锂电池(Lipo)供电的设备。
3s-6S:表示电调适用于3节到6节锂聚合物电池串联供电。
BEC 4.2-5.8V/10A:具备内置免电池电路功能,输出电压可调(4.2-5.8V),最大输出电流10A,为接收机与舵机供电。
HV:支持高压(High Voltage),兼容高压舵机(5.8V)与高压锂电单(单节满电4.35V)
4. 6S 10000mAh电池,电机KV值:400 KV,螺旋桨直径40cm,桨尖线速度为()m/s?
电机转速:n=KV×U
=400×6S×3.7V
=8880RPM
8880RPM÷60=148r/s
线速度 V=π×D 直径(m)×n(电机转速)
=π×0.4m×148r/m≈185.888m/s
5. 解释海拔高度、真实高度、相对高度?它们用什么传感器测量?(各写一个)
海拔高度:以平均海平面为基准面,无人机到海平面的垂直距离。
用GPS测量。
真实高度:以无人机正下方地面为基准面,无人机相对于正下方地面或障碍物顶部的垂直高度。
用超声波高度计测量。
相对高度:以无人机起飞点(本场起降点)的地面为基准面,无人机到起飞点地面的垂直距离
用气压传感器测量。
2026年1月29日甘肃01
1. 6S20000mah,使用15分钟后降落,电池只剩10%,求6旋翼单个电机平均放电电流?
参考答案:
平均放电电流=消耗的电池电量÷消耗该电量所用时间=20AH×(1-10%)÷(15÷60)H=72A
单个电机平均放电电流=平均放电电流÷电机数=72A÷6=12A
2. 写出遥控器八个作用?
参考答案:新建模型、选择模型类型、模型命名、发射制式、通道开关、行程量、反向设定、失控保护、油门曲线、大小舵、教练开关。
3. 写出四个通道,教学顺序?
参考答案:以美国手为例:
第一通道:副翼(AIL);
第二通道:升降(ELE);
第三通道:油门(THR);
第四通道:方向(RUD);
旋翼:第一教油门,因为是起飞的基础;
第二教升降,因为起飞对尾,学习升降控制飞机保护自己;
第三教副翼,可以控制飞机在一定范围内运动;
最后教方向,结合其他通道完成动作。
固定翼:1 升降,2 副翼,3 油门,4 方向。
4. 写出多旋翼无人机飞控的5个传感器?
参考答案:
①三轴磁力计:测地磁场方向,提供航向,避免飞行偏航;
②GPS:获取经纬度、海拔和速度,支持自主导航、返航;
③气压高度计:测量相对高度;
④三轴加速度计:测量飞机各轴加速度;
⑤三轴陀螺仪:测量飞机各轴角速度。
5. 四旋翼单个电机失去效能应该怎么处置,怎么确保安全?
参考答案:有伞开伞;无伞利用仅有动力尽量让其跌落在无人位置;接地瞬间前将油门收至最小,以防着火。
2026年1月27日北京02
1. 中型多旋翼无人机最小起飞重量?
参考答案:大于25KG。
2. LHV 20000MAH 6S2P,求该电池的总能量?
参考答案:额定能量=容量×标称电压=20AH×(3.8V×6)=456WH
3. 将能连的连起来:电池、无刷电调、有刷电机、接收机、IMU、PMU、GPS、飞控、指南针,多连少连均不得分?
参考答案:
电池——无刷电调
电池——PMU
PMU——飞控
飞控——IMU
飞控——接收机
飞控——指南针
飞控——GPS
4. 根据升力公式,在其他条件不改变的情况下,更换高升力翼型改变升力公式中什么的大小?
参考答案:升力系数。
5. 遥控器同频段干扰如何解决?
参考答案:更换频段或者跳频。
2026年1月21日山东04
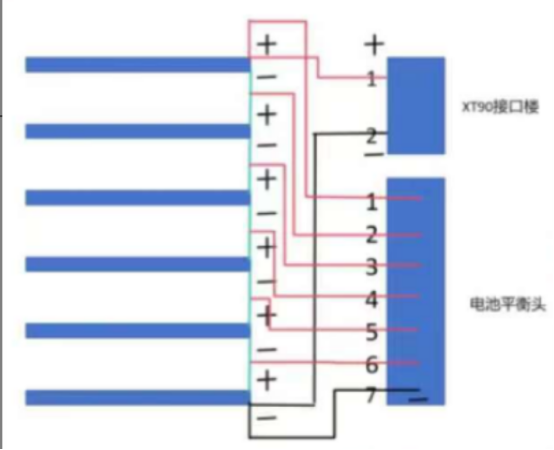
1. 无人机锂电池为什么要使用平衡头充电?(答两点)
答:①能监测每节电芯的电压,实现电芯间电压平衡;
②防止过充或电压不均导致电池损坏、确保电池安全和寿命。
2. 小型、中型多旋翼视距内实践飞行的考试误差?
一、视距内运行实践飞行考试科目要求
多旋翼级别视距内运行实践飞行考试科目可使用导航辅助模式(飞控内、外回路均参与控制,即飞行姿态辅助与位置修正辅助功能都使用),除不满足通用要求外,考试申请人可有三次机会完成以下科目内容。
考核项目 考核要求 通用要求
1 起飞 油门操纵均匀,姿态正常 无危险动作与姿态,操作柔和,航空器部件完好
2 悬停 水平位移不超过±2米,垂直位移不超过±1米 同上
3 慢速水平偏转360° 水平位移误差不超过±2米,垂直位移误差不超过±1米,方向偏转无卡顿,项目考核时间为5至30秒内 同上
4 水平8字 依据航空器性能确定标准航线单个圆直径(小、中型:12米),航空器水平位移误差不超过±2米,垂直位移误差不超过±1米,航空器位移无卡顿,航向与标准航线切线夹角不超过30° 同上
5 定点降落 到达降落点后匀速下降,平稳降落 同上
3. 连线题:动力电池、电调、动力电机、飞控、螺旋桨、接收机、PMU、RTK、空速计(只有固定翼有,且连飞控)
电池→电调→电机→螺旋桨
电池→PMU→飞控
电调→飞控
飞控→数传电台、GPS、接收机
4. 电调80A/150A、3s-6s、Lipo、BEC 5.2-8.0V/10A、HV参数什么意思?(写错漏写不给分)
答:80A/150A,Lipo:表示电调持续、稳定工作电流80A/能够承受的瞬时最大电流150A;适用于锂聚合物电池(Lipo)供电的设备。
3S-6S:表示电调可以使用由3-6节电芯串联组成的锂聚合物电池,对应的电压范围通常为11.1V-22.2V(1S=3.7V)。
BEC5.2-8.0V/10A:表示该电调具备内置的免电池电路(BEC)功能,能够将输入的电池电压转换为稳定,直流电的范围5.2V到8.0V之间,并提供10A的电流输出。
HV:表示该电调支持较高的输入电压,能够适应更高电压的电池配置,以满足高功率设备的需求。
5. 解释海拔高度、真实高度、相对高度?它们用什么传感器测量?(各写一个)
答:海拔高度:也叫绝对高度,即飞机飞行水平面到海平面(大地水准面)的垂直距离;使用GPS测量。
真实高度:是指飞机距离正下方地面的实际垂直高度;使用激光测距传感器、超声波传感器等测量。
相对高度:是指飞机到指定的水平面的垂直距离;使用气压传感器测量。
2026年1月21日山东04
1.当前基础温度6.5℃,上升1000米,求那个当前温度是多少℃?
答:6.5摄氏度-(1000/100)*0.65=0摄氏度
2.驾驶超出操控员执照规定类型飞行器的怎么处罚?
答:根据《无人驾驶航空器飞行管理暂行条例》第五十条
超出操控员执照载明范围操控民用无人驾驶航空器飞行的,由民用航空管理部门处2000元以上2万元以下的罚款,并处暂扣操控员执照6个月至12个月;情节严重的,吊销其操控员执照,2年内不受理其操控员执照申请。
3.根据所考机型选择下述设备正确连线;(PMU,电机,电调,电池,接收机,IMU,GPS,数传电台,LED)?
答:
4.以X飞行器下图为例,四旋翼无人机,上升并右转旋翼(具有连贯性),螺旋桨如何运动的,旋翼的转速是如何变化的?
答:在俯视状态下,电机四个旋翼同时加速,相对于顺时针旋转电机的,逆时针旋转电机的加速更多。
5.有一个72MHz和2.4GHz频段的遥控器,遥控器与无人机之间有一片树林,且发射频率一致,无外部频率干扰,应选用哪一频段的遥控器,请解释原因?
答:应选72MHz;
原因:72MHz属于高频超短波,相对于2.4GHz频率低,波长长,绕射能力强,能绕过较大障碍物,但穿透能力弱;
2.4GHz属于超高频厘米波,相对于72MHz频率高,波长短,绕射能力弱,不过穿透能力较强,能穿透墙壁等障碍物,但穿透过程中信号会有衰减。
2026年1月20日山东04
1. 写出地球南纬,北纬,东经,西经的范围
答:经度(E/东经、W/西经,度数0-180)、纬度(S/南纬、N/北纬,度数0-90)
2. 现有无人机训练用动力电池,电池类型为LHV、规格为6S 30000mah最大放电倍率25C充电倍率最大5C,两组串联,满电电压是多少?最大放电电流是多少?
答:电池组满电电压=单片满电电压×串联数=(4.35V×6)×2=52.2V
最大放电电流=额定容量×最大放电倍率=30A×25C=750A
3. 驾驶无人机去南极飞行的时候,哪个传感器会异常不能工作?此时传感器的读数为多少?(不考虑温度、大气、大气密度对飞行器的影响)
答:磁传感器(如磁罗盘)会因南极特殊磁场环境异常,无法正常工作,传感器读数无固定准确值,呈随机漂移状态,磁罗盘/指南针180度或180度小范围摇摆。
4. 什么是航行风?
答:空气相对于航空器的相对风(或运动速度),由气象风与航空器空速的矢量差计算得出。
5. 教员理论补考间隔(不少于28个日历日);
实践补考间隔(不少于14个日历日);
首个实践考试从(首个项目综合问答);通过后开始计算;
2026年1月13日山东05
1.当前基础温度6.5℃,上升1000米,求那个当前温度是多少℃?
答:6.5摄氏度-(1000/100)*0.65=0摄氏度
2.驾驶超出操控员执照规定类型飞行器的怎么处罚?
答:根据《无人驾驶航空器飞行管理暂行条例》第五十条
超出操控员执照载明范围操控民用无人驾驶航空器飞行的,由民用航空管理部门处2000元以上2万元以下的罚款,并处暂扣操控员执照6个月至12个月;情节严重的,吊销其操控员执照,2年内不受理其操控员执照申请。
3.根据所考机型选择下述设备正确连线;(PMU,电机,电调,电池,接收机,IMU,GPS,数传电台,LED)?
答:
4.以X飞行器下图为例,四旋翼无人机,上升并右转旋翼(具有连贯性),螺旋桨如何运动的,旋翼的转速是如何变化的?
答:在俯视状态下,电机四个旋翼同时加速,相对于顺时针旋转电机的,逆时针旋转电机的加速更多。
5.有一个72MHz和2.4GHz频段的遥控器,遥控器与无人机之间有一片树林,且发射频率一致,无外部频率干扰,应选用哪一频段的遥控器,请解释原因?
答:应选72MHz;
原因:72MHz属于高频超短波,相对于2.4GHz频率低,波长长,绕射能力强,能绕过较大障碍物,但穿透能力弱;
2.4GHz属于超高频厘米波,相对于72MHz频率高,波长短,绕射能力弱,不过穿透能力较强,能穿透墙壁等障碍物,但穿透过程中信号会有衰减。
2026年1月10日四川01
1. OSD是什么模块?
答:OSD:视频叠加模块 On Screen Display
2. 理论成绩有效期(不超过24个日历月);
实践成绩有效期(不超过60个日历日);
理论补考间隔(不少于28个日历日);
实践补考间隔(不少于14个日历日);
实践考试从(首个项目综合问答)通过后开始计算;
3. 《民用无人驾驶航空器管理暂行条例》的颁布机构?
答:国务院与中央军委
4. 螺旋桨 CW CCW 3080 的含义?
答:CW:反桨,俯视状态下,螺旋桨顺时针旋转;
CCW:正桨,俯视状态下,螺旋桨逆时针旋转;
30:代表桨叶直径是30英寸;
80:代表桨叶螺距是8英寸;
5. lipo电池标压44.4V,20Ah,20C,12S1P,求最大电压和最大放电电流?0.5C充电,求其充电电流和时间?
答:电池组最大电压=单片电芯满电电压×串联数=4.2V×12=50.4V
最大放电电流=额定容量×最大放电倍率=20Ah×20C=400A
充电时间=所充比例/充电倍率=1/0.5C=2h=120min
充电电流=额定容量×充电倍率=20Ah×0.5C=10A
2026年1月8日广东02
1.《民用无人驾驶航空器飞行管理暂行条例》中规定操控农用无人驾驶航空器无需取得执照,农用无人驾驶航空器定义中,主要指标参数是什么?
答:根据《无人驾驶航空器飞行管理暂行条例》第六十二条第八款规定,农用无人驾驶航空器是指最大飞行真高不超过30米,最大平飞速度不超过50千米/小时,最大飞行半径不超过2000米,具备空域保持能力和可靠被监视能力,专门用于植保、播种、投饵等农林牧渔作业,全程可以随时人工介入操控的无人驾驶航空器。
2. MD-91-FS-02中多旋翼教员等级实践飞行考试科目要求有哪些?分别从考核科目、考核要求、通用要求三方面说明。
答:- 起飞:油门操纵均匀,姿态正常;
– 悬停:水平位移不超过±2米,垂直位移不超过±1米;
– 顺/逆时针慢速水平偏转360°:水平位移误差不超过±2米,垂直位移误差不超过±1米,方向偏转无倾斜,项目考核时间为5至30秒内;
– 后退水平8字:依据航空器性能确定标准线单个直径(小、中型:12米),航空器水平位移误差不超过2米,垂直位移误差不超过±1米,航空器位移无卡顿,位移速度基本无变化,航向与标准航线夹角不超过25°;
– 定点降落:到达降落点后匀速下降,平稳降落。
– 通用要求:无危险动作与姿态,操作柔和,航空器部件完好。
3. 多旋翼无人机地面站考试科目中,实施阶段的应急操作程序包含哪些内容?写出具体要求和评判标准。
答:- 应急操作程序
1. 按实践考试委任代表指令要求在地面站进行应急返航操作,要求操作时间不多于15秒;
2. 模拟位置信息丢失,仅参照地面站显示的航空器航向、姿态、高度和速度信息(不得参考视觉扩展设备或返航角显示信息),以姿态模式遥控操纵无人机应急返航。需要满足以下要求:
(i) 实践考试委任代表遮挡航迹或无人机位置信息,指令学员返航操作;
(ii) 学员应操纵无人机应急返航,于30秒内确定与直线归航航线角误差不超过45°的归航航向并进入返航航线不少于10秒;
(iii) 参照地面站显示的姿态、航迹、航向、高度等信息,小、中型无人机保持航线高度5米以内超视距飞行;
(iv) 由实践考试委任代表恢复航迹或位置显示,学员在保障安全的条件下遥控无人机返回本场范围(小、中型无人机到达以起飞点为圆心不大于15米半径的区域),根据实践考试委任代表口令切换操纵模式进行降落。
4. IMU、动力电池、遥控器接收机、电调、电机、PMU、GPS、指南针、螺旋桨(多连、少连、错连均不得分)
答:遥控器接收机 —— 电调 —— 电机 —— 螺旋桨|
PMU —— 动力电池
IMU、GPS、指南针与飞控连接。
5. 镍镉电池、锂聚合物电池、高压锂电池的中英文、截止电压、标称电压?
答:- 镍镉电池:英文 Ni-Cd,截止电压 1.1V,标称电压 1.2V;
– 锂聚合物电池:英文 Li-Po,截止电压 3.6V,标称电压 3.7V;
– 高压锂电池:英文 Li-HIV,截止电压 3.6V,标称电压 3.8V。
2026年1月6日山西03
1.该电池能否被带上飞机为什么?(写出运算结果,没有运算结果或运算结果不正确不得分)
答:额定能量=额定电压x电池组容量1.
某两型电机参数如下,①8308 KV180 ②2820 KV550解释一下两型各项参数的含义,并指出哪一种适合驱动低速大桨叶,为什么?
答:①83:代表电机定子线圈直径83mm;
08:代表电机定子线圈高度8mm;
180KV:代表电压每增加1V,电机在空载状态下转速增加180转/分钟;
②28:代表电机定子线圈直径28mm;
20:代表电机定子线圈高度20mm;
550KV:代表电压每增加1V,电机在空载状态下转速增加550转/分钟;
第1种适合驱动低速大桨叶,因为该种电机属粗扁型电机扭矩大,转速低。
2.请将下列经纬度换算成十进制,精确到小数点后四位N31°53′32.91″;E117°27′22.23″(无运算过程不得分)
答:N31°53′32.91″=N31+53′÷60+32.91″÷3600=N31.892475°
E117°27′22.23″=E117+27′÷60+22.23″÷3600=E117.456175°
3.螺距的定义
答:螺距是指螺旋桨旋转一周所前进或上升的距离;
4.前行桨叶和后行桨叶的定义
答:前行桨叶是指飞行器飞行时桨叶转动方向相对于气流迎风的这部分桨叶;
后行桨叶是指飞行器飞行时桨叶转动方向相对于气流顺风的这部分桨叶。
5.某锂聚合物电池参数如下,10000mah6S 最大充电电流2C 最大放电电流20C=(6×3.7V)×10Ah=222Wh
不能带上飞机,因为民航规定严禁携带额定能量超过160Wh;
2025年12月6日山西03
1. 电池计算题 6s20000mah 最大放电25C 充电5C 使用15分钟后降落电池只剩10% 求6旋翼单个电机平均放电电流?
答:放电电流=已消耗电池容量÷放电时间=【20Ah×(1-10%)】÷(15min/60)=72A;
单个电机的平均放电电流=72A÷6=12A;
2. 遥控器的八个功能?
答:USER MENU 用户菜单、LINKAGE MENU 链接菜单、
SERVO 查看通道、MODEL SEL 模型添加、
FUNCTION 功能、SUB-TRIM 辅助微调、
REVERSE 通道反向、FAIL SAFE 失控保护。
3. 当前使用机型飞控传感器?
答:三轴加速度计、三轴角速度计、GPS、气压计、磁罗盘;
4. 教学的四个步骤?
第一教油门,因为是起飞的基础;
第二教升降,因为起飞对尾,学习升降控制飞机保护自己;
第三教副翼,可以控制飞机在一定范围内;
最后教方向,结合其他通道完成动作。
5. 四旋翼单个电机失去效能应该怎么处置,怎么确保安全?
答:
① 立即操作:降油门、调副翼 / 升降维持姿态稳定;
② 迫降选择:优先开阔无障区域;
③ 紧急迫降:接近目标区域时,持续降低油门,让无人机以最低安全速度垂直 / 小角度降落(避免高速坠地损坏设备或造成危险)
④ 后续措施:降落后立即关闭动力,检查电机故障原因(如接线松脱、电机烧毁),故障排除前禁止再次起飞。






暂无评论内容