
2026年4月27日河南03
1.地面站四个准备
答:预先准备;飞行前准备;飞行实施;飞行后讲评。
2.最大充电功率
3.奇数适合几轴
答:三轴
4.多旋翼悬停时的平衡因素
答:升力与重力平衡
反扭矩平衡
俯仰平衡
横滚平衡
5.旋翼飞行器在考试过程中随着风力大小,考试标准分别为几个等级?具体是根据多大的风速来评定的?每个等级考试标准有什么变化?
答:考试标准随着风力大小分为三个等级:
0 – 4米/秒为一级;
4 – 8米/秒为二级;
8米/秒以上为三级。
标准内为一级标准,随着风速增大,每等级考试标准中的允许误差相比前一等级增加15%。
2026年3月15日甘肃03
1. 请简述PID控制中P、I、D三个字母分别代表的含义及核心作用?
答:P:比例;飞控修正补偿的频率。决定飞机倾斜多大角度飞控开始修正,P越高飞控在越小的倾斜角度开始修正,修正次数增加。
I:积分;飞控修正补偿的强度。决定飞控修正到位的快慢,I越高修正到位越快。
D:微分;飞控修正补偿的幅度。决定飞控修正的角度大小。
2. 请说明无人机电动动力系统的主要组成部分,并简述各部分的功能?答:动力电池-电子调速器-动力电机-螺旋桨;
动力电池:动力电源,为无人机提供电能;
电子调速器:控制电机转速,直流转交流,过热保护,接受和反馈飞控信号,BEC输出。
动力电机:将电能转换为机械能,带动桨叶旋转,从而为无人机提供升力来源。
螺旋桨:桨螺旋桨旋转,为无人机提供升力。
3. 请解释螺旋桨1107规格的含义,同时说明正桨的定义,以及CW、CCW分别代表的意义?
答:螺旋桨:11:表示桨叶直径为11英寸;
07:表示桨叶螺距为7英寸;1英寸=2.54cm;
正桨:在俯视状态下,逆时针旋转的桨为正桨;
CCW:正桨代表俯视状态下,桨叶逆时针旋转;
CW:反桨代表俯视状态下,桨叶顺时针旋转;
4. 请对比说明定点转弯、协调转弯、自适应协调转弯三者的区别及适用场景?
答:定点转弯:旋翼在悬停状态下转弯会精确通过每个GPS位置点。在每个位置点会减速,悬停,停留。停留时间可以设置。
协调转弯:飞行器的速度,油门基本不变旋翼会偏离GPS位置点,可能出现在航线拐弯的外侧。
自适应转弯:飞行速度、油门会随航线转弯而减速,旋翼会偏离GPS位置点,但不会出现在航线拐点的外侧;
5. GNSS中文名称及支持的导航系统?
答:GNSS:全球导航卫星系统;
分别有:GPS(美国)全球定位系统;
BDS(中国)北斗卫星导航系统;
GLONASS(俄罗斯) 格洛纳斯全球导航卫星系统;
GALILEO(欧盟)伽利略卫星导航系统
2025年12月27日河南03
1、下图所示悬停飞行中的四旋翼无人机M1和M3加速,M2和M4减速,请问无人机状态会发生什么变化?
答:在俯视状态下,无人机做向右偏航运动;
2、某无人机空载时功耗为40瓦,续航时间为15min,若增加负载后功耗为50瓦,电池容量不变则新的续航时间是多少?
答:新的续航时间=电池能量÷负载功耗=[40W×(15/60)h]÷50W=0.2h=12min;
3、电池鼓包的原因有哪些?至少写三个?
答:过充、过放、低压储存、高压储存、电池短路等;
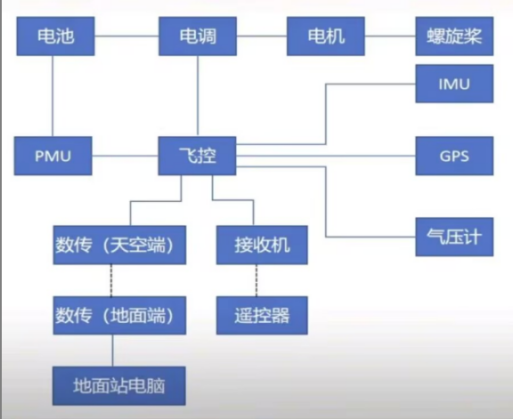
4、画出所考试多旋翼无人机各个部分的组成有哪些?
(图示:电池、电调、电机、PMU、飞控、LED、IMU、GPS、接收机、数传电台的连接关系)
5、旋翼无人机在进行模拟位置丢失应急返航考试中,返航角误差为多少度?用什么模式进行返航?
答:应急返航角误差不超过±45°;
使用姿态模式;





暂无评论内容