

2026年5月8日吉林01
1.海陆风的形成原因,白天和夜晚分别从哪吹向哪?答:海陆风形成原因:海陆热力性质差异:陆地比热容小,升温快、降温也快;海洋比热容大,升温慢、降温也慢。风向:白天风从海上吹向陆地,晚上风从陆地吹向海上。
2.动力系统组成部分?
答:动力电池-电子调速器-动力电机-螺旋桨;根据姿态球,以日本手角度描述手如何进行操作?机头朝下,右边滚转;机头朝下:左手前推杆,左下右下电机加速,左上右上电机减速。右滚转:右手右推杆,左上左下电机加速,右上右下电机减速。
3.经纬度30.8025°121.3075°换算成度分秒
答:E121.3075°=E121°18’27″过程:度=121.3075°取整数=121°,分=0.3075×60=18.45取整数=18,秒=0.45×60=27取整数=27; N30.8025°=30°48’9” 过程:度=30.8025°取整数=30°,分=0.8025×60=48.15取整数=48,秒=0.15×60=9取整数=9
4.经纬度取值范围及换算
取值范图:北纬(N)/南纬(S)0°-90°;东经(E)/西经(W)0°-180° -换算公式:十进制度=度+分÷60+秒÷3600;度分秒=整数部分(度)+小数部分×60(分)+剩余小数×60(秒)
5.选择题,选择正确的是(A、D、E)
A.微型空机重量小于0.25千克,最大飞行真高50米
B.轻型重量不超过7千克
C.小型最大起飞重量超过25千克
D.中型最大起飞重量不超过150千克
E.大型最大起飞重量超过150千克
2026年4月30日河南02
1.大气和干洁空气的主要成分?
大气组成:干洁空气、水汽、固体杂质;
干洁空气组成:(按体积占比):78%氮、21%氧,以及1%其他气体(氩、二氧化碳、氢、氦、氖、氪、氙等)
2.直径120cm,转速1000r/min,求某尖线速度?
答:已知V=w×r(w为角速度,r为半径)
w=2πn(n:转速;转每秒;m/s)
π(圆周率:取3.14)
V=2πnr=nrd(d:直径;d=2r;单位为米;m)
得出V=πnd=3.14×(1000r÷60s)×1.2m=62.8m/s
3.题目不详细
4.经纬度30.8025° 121.3075°换算成度分秒
答:E121.3075°=E121°18’27”
过程:E121.3075°=E121°18’27”
分=0.3075×60=18.45 取整=18
秒=0.45×60=27 取整=27
N30.8025°=30°48’9″
过程:E30.8025°=E30°48’9″
分=0.8025×60=48.15 取整=48
秒=0.15×60=9 取整=9
5.民用无人驾驶航空器未实名登记处罚?涉及境外飞行未依法进行国籍登记的处罚?
第四十七条 违反本条例规定,民用无人驾驶航空器未实名登记实施飞行的,由公安机关责令改正,可以处200元以下的罚款;情节严重的,处2000元以上2万元以下的罚款。
违反本条例规定,涉及境外飞行的民用无人驾驶航空器未依法进行国籍登记的,由民用航空管理部门责令改正,处1万元以上10万元以下的罚款。
2026年4月27日浙江01
1.动力电池、无刷电机、有刷电机、螺旋桨 imu 电台指南针的链接
动力电池–无刷电机
有刷电机–螺旋桨
2.应急返航的时间操作
答:30s
3.动力系统的组成部分并说出它们的作用
答:动力电池-电子调速器-动力电机-螺旋桨;
动力电池:动力电源,为无人机提供电能;
电子调速器:控制电机转速,直流转交流,过热保护,接受和反馈飞控信号,BEC输出。
动力电机:将电能转换为机械能,带动桨叶旋转,从而为无人机提供升力来源。
螺旋桨:螺旋桨旋转,为无人机提供升力。
4.飞控指令中的PITCH、ROLL、YAW、Throttle分别代表什么(此题1分,漏写,错写,均不得分)
答:YAW:代表俯仰角/方向感度;
PITCH:代表侧向偏角/方向感度;
ROLL:代表滚转角/方向感度;
Throttle:油门;
5.RC compass GCS英文译中文
答:RC遥控器
Compass:磁罗盘
GCS:地面控制站
2026年3月17日河南01
1. ELE、AIL、THR分别代表什么?
答:ELE:升降,AIL:副翼,THR:油门。
2. 转速1000r/min,螺旋桨直径60cm,求桨尖线速度为m/s?
答:桨尖线速度=3.14×0.6×1000/60=31.4m/s
3. X型气动布局四轴四旋翼无人机,以日本手为例俯视右上角螺旋桨CCW无人机姿态做下列改变时,请标出各旋翼的加速减速变化(加速请填“+”,减速请填“-”,本题1分,错填请不得分?
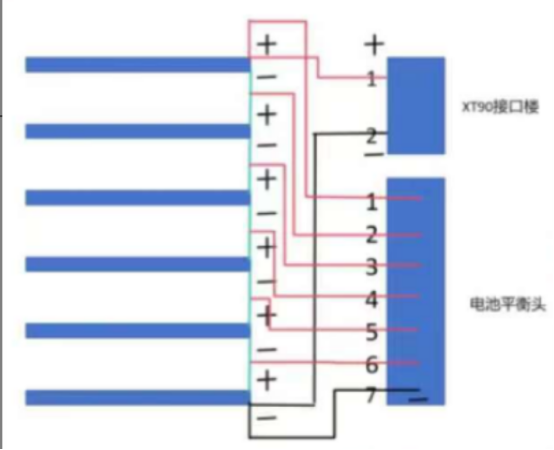
4. 画出6s电池结构图?((图注:电源插头、平衡头、6S电池接线图)
5. 经纬度换算:112.21°、21.705°换算成分秒形式?(押中的题)
答:十进制转度分秒:先取整数部分为度,小数部分×60得出的整数为分,剩余小数×60为秒
0.21×60=12.6 0.6×60=36 112.21°=112°12′36″
0.705×60=42.3 0.3×60=18 21.705°=21°42′18″
2026年3月13日山东02
1. ELE、AIL、THR分别代表什么?
答:ELE:升降,AIL:副翼,THR:油门。
2. 转速1000r/min,螺旋桨直径60cm,求桨尖线速度为m/s?
答:桨尖线速度=3.14×0.6×1000/60=31.4m/s
3. X型气动布局四轴四旋翼无人机,以日本手为例俯视右上角螺旋桨CCW无人机姿态做下列改变时,请标出各旋翼的加速减速变化(加速请填“+”,减速请填“-”,本题1分,错填请不得分?
4. 画出6s电池结构图?((图注:电源插头、平衡头、6S电池接线图)
5. 经纬度换算:112.21°、21.705°换算成分秒形式?(押中的题)
答:十进制转度分秒:先取整数部分为度,小数部分×60得出的整数为分,剩余小数×60为秒
0.21×60=12.6 0.6×60=36 112.21°=112°12′36″
0.705×60=42.3 0.3×60=18 21.705°=21°42′18″
2026年3月12日山东05
第1题
题目:22.2V 22000mAh 5C 两组这样的电池并联,满电电压多少?放电电流多少?0.5C充电,充电电流多少?充电时间多少?
– 满电电压:单片电芯串联数×单片电芯满电电压 = 6S × 4.2V = 25.2V
– 放电电流:放电倍率×电池容量 = 5C × 22Ah × 2 = 220A
– 充电电流:充电倍率×电池容量 = 0.5C × 22Ah × 2 = 22A
– 充电时间:1/充电倍率 = 1/0.5 = 2h
第2题
题目:飞机机体激荡厉害,调什么?
主要调节P(比例)
机体激荡说明飞控的修正过于频繁,响应过强产生对冲,P值偏大,应适当减小P值以降低响应灵敏度。
(低频晃动:P过小,修正力度不够)
第3题
题目:遥控器怎么调飞机灵敏度?
1. 大小舵
2. 行程量
3. EXP曲线(油门曲线,螺距曲线,副翼/升降/方向曲线)
4. 摇杆长度
第4题
题目:民用无人驾驶航空器未经实名登记实施飞行活动的,由(公安机关)责令改正,可以处(200元以下)的罚款;情节严重的,处(两千元以上两万元以下)的罚款。涉及境外飞行的民用无人驾驶航空器未依法进行国籍登记的,由(民用航空管理部门)责令改正,处(一万以上十万以下)罚款?
第5题(多选)
题目:多旋翼无人机使用遥控器不能解锁造成的原因有哪些?(CDEF)
A. 电机转向不正确
B. 桨叶安装不正确
C. 油门通道设置不正确
D. 指南针未校准
E. 遥控器未校准
F. IMU未校准
2026年3月1日河南02
1、无人机超视距考试标准,水平偏转360°:水平位移误差不超过±2米,垂直位移误差不超过±1米,,角度偏差±30°,完成时间为5至30秒内。水平8字:水平偏差±2,高度偏差±1,飞机沿圆切线速度0.3 – 3m/s,考试时间范围180秒以内。
2、6s2p16000mah的电池25C5C飞行10分钟,剩余20%的电,八旋翼求单个电机的平均电流。
答:平均电流=总电流÷8=(消耗电量÷飞行时间)÷8=(16ah×(1 – 20%)÷(10min÷60min))÷8≈9.6A
3、电调150A、3s – 6s、Lipo、BEC5.2 – 8.0V/10A、HV参数什么意思?
答:150A:代表电调持续、稳定工作的最大电流为150A;3 – 6S、Lipo:表示电调可以使用由3 – 6节电芯串联组成的锂聚合物电池,对应的电压范围通常为11.1V – 22.2V(1S=3.7V);BEC5.2 – 8.0V/10A:表示该电调具备内置的免电池电路(BEC)功能,能够将输入的电池电压转换为稳定直流电的范围5.2V到8.0V之间,并提供10A的电流输出;HV:表示该电调支持较高的输入电压,能够适应更高电压的电池配置,以满足高功率设备的需求。
4、6S10000mAh电池,电机KV值:400 螺旋桨直径40cm,桨尖线速度为()m/s?
答:电机转速=3.7V×6×400=8880转/分;桨尖线速度=3.14×0.4×8880÷60≈185.89m/s
5、解释真实高度,相对高度,海拔高度的,并各列举一个传感器。
答:相对高度是指飞行器相对于某一特定参考平面(如起飞点、地面某一标志物等)的垂直距离,用气压传感器测量。海拔高度,指无人机所在位置相对于海平面的垂直高度,用GPS测量。真实高度是相对于正下方地面或障碍物顶部的垂直高度,用超声波传感器测量。
2026年2月27日湖南03
1. 飞控参中,Yaw、Roll、Pitch的中文意思?
答:Yaw:代表偏航方向感度
Roll:代表滚转方向感度
Pitch:代表俯仰方向感度
2. 根据《无人驾驶航空器飞行管理暂行条例》,超出操控员执照载明的操控范围用无人驾驶航空器飞行,会进行何种处罚?
答:由民用航空管理部门处2000元以上2万元以下罚款,并处暂扣操控员执照6个月至12个月;情节严重的,吊销其操控员执照,2年内不受理其操控员执照申请。
3. 10000mAh,6S2P,锂聚合物电池,充电倍率2C,放电倍率15C。剩20%电量时,无人机落地,4旋翼电机单个电机悬停功率为111W,求此从满电到剩余20%电量这个过程无人机悬停时间为多少分钟?
电池总能量:22.2V×10Ah=222Wh
消耗能量:222Wh×80%=177.6Wh
总功率:111W×4=444W
时间:177.6Wh÷444W=0.4h=24分钟
4. 无人机电池在使用平衡充电器的过程中出现鼓包现象,请问什么原因导致的,至少写3个原因?
答:过度充电、过度放电、电池老化、高温环境、物理损伤、存放不当
5. 常见电池分类?
LiPO:标称3.7V,充电截止4.2V
Ni-MH:标称1.2V,充电截止1.5V
LiFePO4:标称3.2V,充电截止3.65V
2026年2月9日吉林01
1、电池计算题(填空形式的)
2、度分秒换算
3.轴距的定义?
无人机的轴距是指对角线两个螺旋桨中心的距离通常以毫米为单位,游戏的光轴距不仅影响螺旋桨尺寸和载重能力,还会影响无人机的稳定性、机动性:轴距越大,无人机稳定性越强、载重能力越高,但机动性会下降;反之轴距越小,机动性越好,载重和稳定性则偏弱。
4、前行桨叶和后行桨叶的定义
前行桨叶是指飞行器飞行时桨叶转动方向相对于气流迎风的这部分桨叶;
后行桨叶是指飞行器飞行时桨叶转动方向相对于气流顺风的这部分桨叶。
5、解释YAW、ROLL、PITCH的含义?
YAW:代表偏航方向感度
ROLL:代表滚转方向感度
PITCH:代表俯仰方向感度
2025年11月24日江西02
1、GNSS和GCS中文?
答:GNSS:全球导航卫星系统;GCS:地面控制站;
2、理论有效期:不超过24个日历月;
理论补考间隔:不少于28个日历日;
综合问题有效期:不超过60个日历日;
实操补考间隔:不少于14个日历日;
实操过期后,从(综合问答)开始补考;
3、北纬39度12分36秒,东经116度42分36秒化小数
答: 北纬:39°+12’÷60+36″÷3600=39.21°
东经:116°+42’÷60+36″÷3600=116.71°
4、应急返航航向角误差多少度?什么模式回来?
答:应急返航角误差不超过士45°;使用姿态模式;
5、一块6s10000mah2C(充电)求单片电芯的容量是多少?然后用电至20%,用10A充电,多少时间充满?
答:单片电芯容量=10Ah;充电时间=需充电池组容量÷充电电流=10Ah× (1-20%) ÷10A=0.8h=48min;
![图片[1]-张凯口试真题-更炽热无人机CAAC执照备考](https://caac.hotteruav.cn/wp-content/uploads/2026/04/image-34.png)
2025年11月26日湖北01
1、22.2V 16800mah 20C两块并联,计算满电电压和最大电流,用1C充电器计算充电时间是多少?
答:满电电压=单片电芯的满电电压×单块电池电芯的串联数=4.2V×6=25.2V;
最大电流=电池组容量×最大放电倍率=(16.8Ah×2)×20C=672A;
充电时间=电池组容量÷充电电流=(16.8Ah×2)÷(16.8Ah×2×1)=1h=60min;
2、四个阻力和解决方法?
答:飞机在低速飞行时主要受到摩擦阻力、压差阻力、干扰阻力和诱导阻力;
摩擦阻力:增加机身表面光洁程度;
压差阻力:优化机身外形,趋近于流线型;
干扰阻力:整流包皮;
诱导阻力:增大展弦比,使用翼稍小翼;
3.什么是迎角;
答:是指机翼翼弦与相对来流方向形成的夹角;
4、写出遥控器四个通道的中文英文,以及教学顺序?
答:副翼(AIL)、升降(ELE)、油门(THR)、方向(RUD);
第一教油门,因为是起飞的基础;
第二教升降,因为起飞对尾,学习升降控制飞机保护自己;
第三教副翼,可以控制飞机在一定范围内;
最后教方向,结合其他通道完成动作;
5、LIPV和LIHV 中文意思,标称电压和满电电压分别是多少?
答:LiPO(锂聚合物电池)标称电压3.7V;满电电压:4.2V;
LiHV(锂离子聚合物高压电池):标称电压3.8V;满电电压:4.35V;
2025年12月17日河南01
1. 30摄氏度转化为华氏度是多少?
答:根据公式:摄氏度℃=(华氏度℉ – 32)×5/9;华氏度℉=摄氏度℃×9/5 + 32=30×9/5 + 32=86℉。
-解读:摄氏与华氏温度的换算为无人机飞行气象数据读取的基础知识点,需熟记换算公式。
2. 6S20000mah电池,用5c充电,飞行21分钟剩余30%电量,求工作平均放电倍率?
答:平均放电倍率=放电电流÷电池容量=[20Ah×(1-30%)/(21min/60)]÷20Ah=(1-30%)/(21min/60)=2C。
-解读:放电倍率是无人机电池性能的核心参数,2C表示电池放电电流为额定容量的2倍,该计算需掌握时间单位换算与倍率公式。
3. 无人机实践飞行通用规定是什么?
答:实践飞行科目通用条件:无危险动作与姿态,操作柔和,航空器部件完好。
-解读:这是无人机实操考试的基础要求,核心是保障飞行安全与设备完好。
4. GNSS、COMPASS、IMU中文分别是什么?
答:GNSS:全球导航卫星系统;COMPASS:指南针或磁罗盘;IMU:惯性测量单元。
-解读:三者均为无人机导航与姿态感知的核心系统,GNSS负责定位,COMPASS定方向,IMU测运动状态。
5. 飞控上能显示高度的传感器有哪些(4个以上)?
答:GPS、气压高度计、超声波传感器、红外传感器、毫米波雷达、激光高度传感器、光流传感器。
-解读:不同传感器从不同原理实现高度测量,GPS测绝对高度,气压高度计测相对高度,超声波/激光等适用于低空精准测高。






暂无评论内容