

2026年5月8日江西01
1.人机和环境三个方面来解释如何安全飞行
答:人:持有有效执照,熟悉飞行手册和空域法规,具备良好的身体状态和应急处置能力。
机:无人机状态适航,完成实名登记,动力充足,系统功能正常。
环:选择开阔、无干扰的合法空域,提前了解并避开禁飞区,评估天气是否适合飞行。
2.GPS和气压温度计偏差超过100米是什么原因解释
答:气压变化 测量基准不同
环境温度影响 GPS信号质量差 传感器故障
3.无人机飞行的时候遇到强侧风应该怎么处理?
答:切换飞行模式:迅速从GPS模式切换至姿态模式或手动模式
手动修正姿态:向风来向压杆,使飞机向风方向倾斜,产生一个与侧风相反的力,从而修正航迹,保持机身平稳。
立即降落:若侧风过大,应果断终止飞行。选择空旷、安全的场地,尽量远离障碍物,减小侧风影响,尽快安全着陆。
4.无人机系统会向民航局发送什么信息,两种发送信息的方式
答:身份信息、位置、速度、时间、运行状态等。
网络状态运行识别
广播式运行识别
5.民用无人驾驶航空器运行安全管理规则和无人驾驶航空器飞行管理暂行条例实施日期
答:2024年1月1日
2026年4月14日广东06
1.人、机、环三个方面来解释如何安全飞行
答:人:持有效执照,熟悉飞行手册和空域法规,具备良好的身体状态和应急处置能力。
机:无人机状态适航,完成实名登记,动力充足,各系统(飞控、图传、动力)功能正常。
环:选择开阔、无干扰的合法空域,提前了解并避开禁飞区,评估天气(风速、能见度)是否适合飞行。
2.GPS和气压温度计偏差超过100米是什么原因解释
答:气压变化、测量基准不同;
环境温度影响、GPS信号质量差、传感器故障。
3.无人机飞行的时候遇到强侧风应该怎么处理?
答:切换飞行模式:迅速从GPS模式切换至姿态模式或手动模式;
手动修正姿态:向风来向压杆,使飞机向风方向倾斜,产生一个与侧风相反的力,从而修正航迹,保持机身平稳。
立即降落:若侧风过大,应果断终止飞行。选择空旷、安全的场地,尽量逆风降落以缩短滑跑距离,减小侧风影响,尽快安全着陆。
4.无人机系统会向民航局发送什么信息,两种发送信息的方式
答:身份信息、位置、速度、时间、运行状态等。
网络式运行识别
广播式运行识别
5.民用无人驾驶航空器运行安全管理规则和无人驾驶航空器飞行管理暂行条例的实施日期?
答:2024年1月1日
2025年12月14日安徽02
1.根据相关法律法规人、机、环合法飞行。
答:
人:持有效对应等级无人机执照,熟知空域规则与应急流程。
机:完成实名登记/备案,设备适航、功能正常。
环:获批空域和飞行计划,避开禁限飞区,气象条件达标。
2.某地GPS高度和气压高度相差100米,是什么原因导致的。
答:测量基准与原理不同:GPS测海拔绝对高度,气压高度以开机点为相对基准;诱因包括气象气压突变、温度影响、开机点环境差、传感器校准不足或GPS信号遮挡;
3.无人机飞行过程中遇到强侧风怎么办。
答:①降高度减油门,缩短留空时间;
②切手动/姿态模式,手动修正航向;
③向风来向压杆,修正偏流保航线;
④选开阔场地,逆风缓慢迫降。
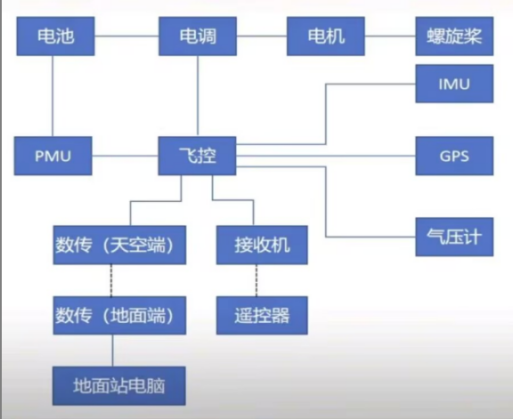
4.飞控系统的组成部分。
答:传感器(三轴速率陀螺、三轴加速度计、三轴磁力计、GPS、气压高度计、空速传感器等);
处理器(ARM、DSP、FPGA等);
伺服设备(舵机、电调);
5. 简述定点转弯,协调转弯,自适应协调转弯的区别。
答:定点转弯:旋翼在悬停状态下转弯会精确通过每个GPS位置点。在每个位置点会减速,悬停,停留。停留时间可以设置。
协调转弯:飞行器的速度,油门基本不变旋翼会偏离GPS位置点,可能出现在航线拐弯的外侧。
自适应转弯:飞行速度、油门会随航线转弯而减速,旋翼会偏离GPS位置点,但不会出现在航线拐点的外侧;





暂无评论内容