
2026年4月22日青海02
1.25000毫安的电池,6轴飞行器,每个电机20A,使用时间是多少,计算总电流消耗。
答:飞行器有6个电机,每个电机消耗20A电流,因此总电流为:6(电机)×20 A/电机 = 120 A
统一单位并计算理论时间:将电池容量从毫安时(mAh)换算为安时(Ah),然后除以总电流。
电池容量:25000 mAh = 25 Ah
理论时间:25 Ah ÷ 120 A = 0.2083 小时
换算为分钟:0.2083 小时 × 60 分钟/小时 ≈ 12.5 分钟
2.1141电机 2500kv 1045桨叶各数字是什么意思
答:
11:电机定子直径 11mm
41:电机定子高度 41mm
KV值 2500:空载下,每1V电压对应2500转/分钟
10:桨叶直径 10英寸
45:桨叶螺距 4.5英寸
1英寸 = 2.54cm
3.法规里对载员时长要求?
答:带飞100小时;单飞200小时。
4.IMU的5个作用
答:作用:①测量飞机的角速度;
②测量飞机的加速度;
③感知飞机的方位变化和速度变化;
④解算飞机在三维空间中的姿态;
⑤调整并恢复飞机的姿态。
2026 年2月27河南03
1. 6S2P 电池,22000 毫安时,2C 充电倍率,求充电电流和充电时间?
答:充电电流=22Ah×2C=44A;充电时间=1÷充电倍率=1÷2C=0.5h=30min
2. 定位系统的工作原理?
答:各星与地面 GPS 接收机都有统一的标准时间,各星向外广播发送这个时间及本星的位置(星历),地面 GPS 接受机根据收到的各星位置与时间差反推计算出自己的位置。
3. 求 6S 至 12S 电池的电压范围?
答:6 – 12S:表示适配 6 – 12 节电芯串联的锂聚合物电池
标准电压范围 22.2V(3.7V×6S)至 44.4V(3.7V×12S)
满电电压范围 25.2V(4.2V×6)至 50.4V(4.2V×12)。
4. 匀速飞行状态下的飞行器,高速飞行和低速飞行,哪个升阻比比较大?为什么?
答:低速行时升阻比最大。升阻比是升力与阻力的比值 L/D ,低速时阻力以诱导阻力为主(随速度降低而增大);匀速巡航时诱导阻力与废阻力平衡,总阻力达到最小值,即升阻比达到最大;高速时废阻力(尤其是压差阻力、摩擦阻力)急剧增大,升力增加却趋于平缓,导致升阻比显著下降。
5. 视距内超视距自旋飞行的八字标准?
答:慢速水平偏转 360° :水平位移误差不超过±2 米,垂直位移误差不超过±1 米。方向偏转无卡顿,完成时间为 5 至 30 秒内。水平八字:依据航空器性能确定标准航线单个圆直径(小、中型:12 米),水平位移误差不超过±2 米,垂直位移误差不超过±1 米。航空器位移速度 0.3 – 3m/s,角速度 8 – 45 度 / 秒,航向与标准航线切线夹角不超过 30° ,完成时间 180 秒以内。
2025年12月27日河南03
![图片[1]-卢介口试真题-更炽热无人机CAAC执照备考](https://caac.hotteruav.cn/wp-content/uploads/2026/04/image-6.png)
2026年1月15日甘肃03
1.30000mA 电池,四旋翼,单个机臂放电30A。理论续航多长时间?
答:理论续航时间 = \frac{电池组容量}{总电流} = \frac{30\ \text{Ah}}{4 \times 30\ \text{A}} = 0.25\ \text{h} = 15\ \text{min}
2.GPS定位系统工作原理?
答:各星与地面GPS接收机都有统一的标准时间,各星向外广播发送这个时间及本星的位置,地面GPS接收机根据收到的各星位置与时间差反推计算出自己的位置;
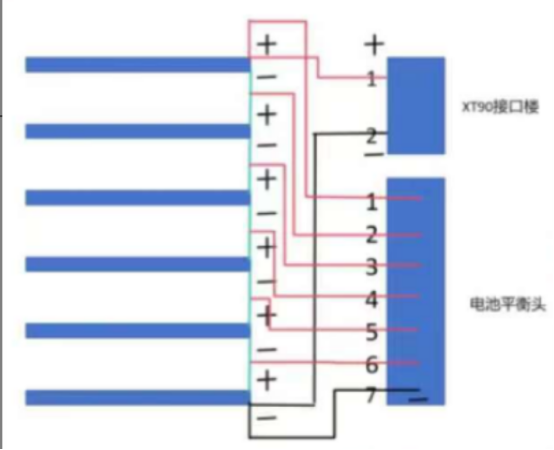
3.画图所考机型电路图不少于7个?
(电路图包含模块:电池、电调、电机、螺旋桨、PMU、飞控、数传电台、GPS、接收机)
4. 教学顺序?
答:第一教升降,因为起飞对尾,学习升降控制飞机保护自己;
第二教副翼,可以控制飞机在一定范围内;
第三教方向,结合其他通道完成动作。
第四教油门,因为是起飞降落存在较高危险,在开始训练的时候先由教练进行起飞降落操作,待学员掌握一定程度后再进行油门的操作训练;
5.所考机型的无人机按重量分布有哪几类?
答:小型无人驾驶航空器,是指空机重量不超过15千克且最大起飞重量不超过25千克,具备符合空域管理要求的空域保持能力和可靠被监视能力,全程可以随时人工介入操控的无人驾驶航空器,但不包括微型、轻型无人驾驶航空器。
中型无人驾驶航空器,是指最大起飞重量不超过150千克的无人驾驶航空器,但不包括微型、轻型、小型无人驾驶航空器。






暂无评论内容