

2026年4月26河北04
1.X型气动布局四轴旋翼无人机,以mode1日本手为例俯视右上角螺旋桨为CCW 无人机姿态做下列改变时,请标出各旋翼的加减速变化(加速请填“+”,减速请填“-”),本题1分,错填漏填不得分。
| 左上桨叶 | 右上桨叶 | 左下桨叶 | 右下桨叶 | |
|---|---|---|---|---|
| 左手顶杆 | – | + | – | + |
| 右手左压杆 | – | + | – | + |
| 右手右压杆 | – | + | – | + |
(mode2是美国手)
2.桨叶半径18cm、1500r/min 求线速度 m/s?
答:线速度=桨叶面积周长 (M) ÷旋转一周所需时间 (S) = 2πR÷(60s÷1500r/s) = 28.26m/s
3.阻力公式及名字含义?四个阻力和解决办法?
答:D=1/2ρV² S Cd
D: 阻力,ρ: 飞行器所在高度的空气密度,V: 机翼相对于气流的速度,S: 通常指机翼的平面投影面积。固定翼:机翼的有效面积(非垂直投影面积);旋翼机:旋翼旋转的扫掠面积。Cd: 阻力系数。
四个阻力:摩擦阻力、压差阻力、干扰阻力和诱导阻力。
解决办法:
摩擦阻力:增加机身表面光滑程度。
压差阻力:改变机体外形,趋近于流线型。
干扰阻力:安装整流板。
诱导阻力:增大展弦比,使用翼梢小翼。
4.LIPO 和 LIHV 两个电池的中文、标称电压、满电电压。
电池类别 | 电池名称 | 标称电压 | 满电电压
LIPO | 锂聚合物电池 | 3.7V | 4.2V
LIHV | 高压锂电池 | 3.8V | 4.35V
5.理论考试通过后有效期(不超过24个日历月);实践考试科目通过后有效期(不超过60个日历月);理论补考间隔(不少于28个日历日);实践补考间隔(不少于14个日历日);实践考试需在(不超过60个日历日)内完成;实践考试有效期从(综合问答)通过后开始计算。
2026年4月21广东01
1.lipo电池,标称电压22.2V,容量6800mah,求额定能量?能否带上飞机?
答:额定能量=22.2×6.8=150.96Wh < 160Wh
可以携带
2.空速是什么速度是什么,以及空速地速风速之间的关系?
答:空速:无人机相对于周围空气的运动速度;
地速:无人机相对于地面固定参考点的运动速度;
V地速=V空速+V风速
3.内外回路定义
答:内回路是指飞行控制系统中的一个闭合控制回路,主要用于姿态控制和稳定性增强;
外回路是接收用户飞行指令和位置/速度传感器反馈,输出目标姿态角给内回路,实现无人机位置、速度、航迹宏观控制的上层闭合控制回路。
内回路的作用是:维持无人机姿态稳定;
外回路的作用是:实现无人机的定位与导航。
3.沿纵轴、横轴、立轴做什么运动?
答:
沿纵轴做向前或向后运动;绕纵轴做旋转运动;
沿横轴做向左或向右水平移动;绕横轴做俯仰运动;
沿立轴做上下升降运动;绕立轴做偏航运动;
4.OC PC AC TC解释。
答:
OC:运营合格证
PC:生产许可证
AC:单机适航证
TC:型号合格证
2026年2月26日湖南02
1. X型气动布局四抽四旋翼无人机,俯视右上角螺旋桨为CCW无人机姿态做下列改变时,请标出各旋翼的加减速变化(加速请填”+”,减速请填”-“,本题1分,错填漏填不得分)
/ 左上桨叶 右上桨叶 左下桨叶 右下桨叶
后仰 + + – –
右滚转 + – + –
左偏航 + – – +
右偏航 – + + –
2. 桨叶直径 36cm、1000r/min,求线速度 m/s?
6.求桨叶的线速度
核心公式:V(线速度)=ωr=2πnr=πdn’
ω:角速度(rad/s) r:半径(m) d:直径(m)
n:每秒转速(r/s)
如果是每分钟转速(r/min)需要转换成(r/s)d(直径)=36cm=0.36m
n=1000r/min=1000/60≈16.667r/s
π取3.14;线速度V=πdn=3.14×0.36m×16.667r/s≈18.84m/s
3. 飞控调参中,Yaw、Roll、Pitch的中文意思?
YAW:代表偏航方向感度
ROLL:代表滚转方向感度
PITCH:代表俯仰方向感度
4. 无人驾驶航空器超出驾照驾驶如何处罚?
超出操控员执照飞行,由民用航空管理部门处2000元以上2万元以下的罚款,并处暂扣操控员执照6个月至12个月;情节严重的,吊销其操控员执照,2年内不受理其操控员执照申请。出自《无人驾驶航空器飞行管理暂行条例》第五十条
5. 应急返航航向角误差多少?用什么模式?
应急返航航向角误差不超过±45°,姿态模式
2026年2月9日广东02
1. CW与CCW的区别,某轻型无人机螺旋桨型号标注为9450代表的什么含义?
答:CW:俯视顺时针旋转CCW:俯视逆时针旋转
螺旋桨9450含义:94指螺旋桨直径为9.4英寸,50指螺旋桨螺距5.0英寸(1英寸=2.54cm=25.4mm)
2. 《无人驾驶航空器飞行管理暂行条例》的实施时间?依托此条例交通运输部出台了什么规则,需写出规则对应编号?条例中提出的微、轻、小型无人机在适飞空域内进行融合飞行是否需要经空中交通管理机构批准?
答:2024年1月1日 编号:CCAR-92依托此条例出台了《民用无人驾驶航空器运行安全管理规则》,微型、轻型无人机在适飞空域内进行融合飞行不需要经空中交通管理机构批准;
小型无人机在适飞空域内进行融合飞行(≤300m)需要经空中交通管理机构批准。
3. 5S 2000MAH 充电倍率2C,放电倍率40C,问电池组最大电压、最大充电电流、标称能量是多少?
答:最大电压=单片电芯的满电电压×电芯串联数=4.2V×5=21V
最大充电电流=电池组容量×充电倍率=2AH×2C=4A
标称电压=单片电芯的标称电压×电芯串联数=3.7V×5=18.5V
标称能量=容量×标称电压=2AH×18.5V=37Wh
4. 执照考试管理办法中旋翼无人机在进行模拟位置丢失应急返航实践考试,明确允许的返航角度误差为(不超过±45°)。需要用(姿态)模式进行返航。
执照申请人理论考试成绩通过后有效期(不超过24个日历月)
理论考试未通过申请补考间隔日期为(不少于28个日历日)
综合问答考试通过后成绩有效期为(不超过60个日历日)
综合问答未通过申请补考的间隔日期为(不少于14个日历日)
实践飞行考试未通过申请补考的间隔日期为(不少于14个日历日)
5. 飞控接口VCC GND RX TX分别代表什么含义?
答:VCC:电源正极(供电端)提供电路工作所需电压,GND:电源负极(接地端)形成电流回路
TX:发送端(Transmit),属于串行通信的输出信号,来自当前设备的发送引脚,连接到对方的接收引脚(RX)。
RX:接收端(Receive),属于串行通信的输入信号,来自当前设备的接收引脚,连接到对方的发送引脚(TX)。
2026年1月10日湖北04
1. 22000mah 放电倍率 2C 算最大放电电流?还有充电时间?
答:最大放电电流=额定容量×最大放电倍率=22Ah×2C=44A
充电时间=额定容量÷充电电流=22Ah÷(22Ah×1C)=1h=60min
2. 经纬度换算?
经纬度度分秒换算度的方法:
度+分÷60+秒÷3600;
例如:115°16′28″=115°+16÷60+28÷3600
=115°+0.2666666667+0.0077777778
=115.2744444448°
经纬度度换算度分秒的方法:
1)小数点前取度;
2)取完度后小数点后×60,得数小数点前取分;
3)取完分后小数点后×60,得数为秒;
例如:115.27778°
1)115 为度数 115°;
2)0.27778°×60=16.6668″,取 16 为 16′;
3)0.6668″×60=40.0008″,可以约等于 40″;
换算结果就是 115°16′40″
注意:由于小数点取值不同,精度会有差异
3. 子午线又称什么?
答:子午线也称经线
本初子午线又称 0°经线;
4. 无人机动力系统有哪些?作用是什么?
答:动力电池 – 电子调速器 – 动力电机 – 螺旋桨;
动力电池:动力电源,为无人机提供电能;
电子调速器:控制电机转速,直流转交流,过热保护,接受和反馈飞控信号,BEC输出。
动力电机:将电能转换为机械能,带动桨叶旋转,从而为无人机提供升力来源
螺旋桨:桨螺旋桨旋转,为无人机提供升力。
5. 理论成绩有效期(不超过24个日历月)
实践成绩有效期(不超过60个日历日)
理论补考间隔(不少于28个日历日)
实践补考间隔(不少于24个日历日)
实践考试从(综合问答)通过后开始计算;
2025年12月21日广东01
1. 22000mah剩20%电量,充满用时48分钟,得用多少A?
答:充电电流=需充电池容量÷充电时间=[22Ah×(1-20%)]÷(48min/60)=22A;
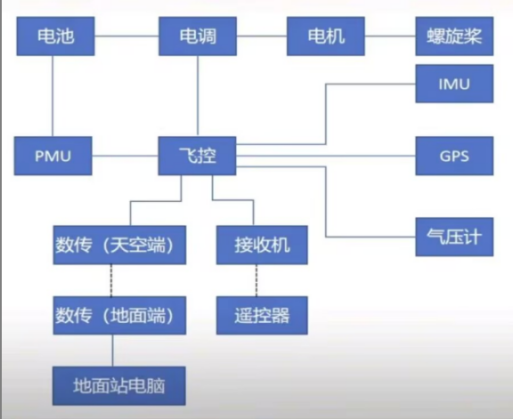
2. IMU,PMU,电机,电调,电池,飞控,GPS,LED,数传电台连线?
(连线图示:电池连接电调、PMU;电调连接电机、飞控;PMU连接飞控;飞控连接LED、IMU、GPS、数传电台)
3. 什么是子午线?
答:子午线也称经线,和纬线一样是人类为度量方便而假设出来的辅助线,定义为地球表面连接南北两极的大圆线上的半圆弧。
4. 多旋翼的桨叶和飞行器相似,为什么桨叶各点的速度和迎角不相等?
答:多旋翼的螺旋桨从结构和工作原理上来说,更接近与固定翼飞机的螺旋桨;
原因:①线速度差异:螺旋桨各半径处转动半径不同,线速度v=ω×r(ω为角速度,r为半径),半径越大线速度越大;②迎角差异:螺旋桨为扭转设计,由于不同半径处线速度不同,为保证各截面产生均匀升力,需通过扭转调整迎角(半径越大处迎角越小,抵消线速度增大带来的升力增量)
5. 下行链路中断,会发生什么,怎么处理?
答:无人机下行链路中断地面站软件上的飞行状态和数据不再更新。
1、首先尝试重新连接下行链路;
2、无人机在视距内应尽快遥控着陆;
3、无人机在视距外应发送指令,等待飞机返航;
4、个别情况下,可依靠任务设备图像返航;





暂无评论内容