
2026年4月25日重庆02
1.地面站考试,根据考试合格标准,按照考官要求定点、变高、变速分别在多长时间内完成?
答:按考试指令要求在操作时间限制内修改航线;修改航线时要求如下:
航线规划三要素:
①30秒内单点起飞高度
②60秒内单点降落高度
③30秒内改平飞速度
应急操作程序标准:(填空)
(1)按考试指令要求在地面站进行应急返航操作,要求操作时间不多于15秒;
(2)模拟机位信息丢失,仅需根据地面站的航班信息、姿态、高度和速度信息(不得参考视觉扩展设备或返航显示信息),以姿态模式遥控操纵无人机返回机场。
① 按考试指令要求在地面站进行应急返航操作,要求操作时间不多于15秒;
② 模拟机位信息丢失,仅需根据地面站的航班信息、姿态、高度和速度信息(不得参考视觉扩展设备或返航显示信息),以姿态模式遥控操纵无人机返回机场。
2.气压式高度计工作原理:
答:基于大气压力随海拔高度升高而逐渐降低的物理特性,气压高度计实时采集当前环境大气压强,与起飞初始位置的基准气压进行对比运算,精准推算出发场到起飞点的飞行高度。以此作为飞行高度监测与飞行提供数据支撑。
3.转速1000rpm(r/min),螺旋桨直径15cm,求桨尖线速度为m/s?
答:核心公式:v = 2πnr
r: 桨半径(米)=桨径÷2
n: 转速(转/分钟)
v: 取3.14
线速度 = 2×3.14×(1000/60)×0.075m = 7.85m/s 米/秒
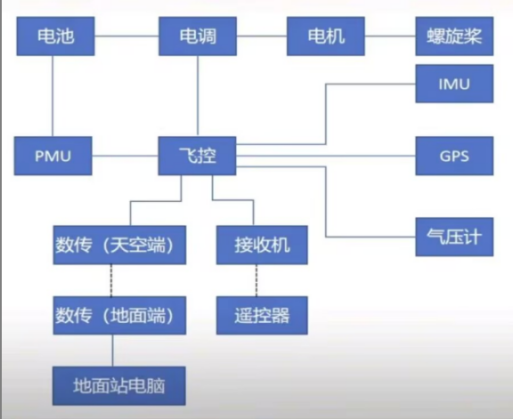
4.IMU、动力电池、无刷电机、有刷电机、PMU、GPS、指南针、螺旋桨、空速计
答:
PMU —— 动力电池 —— 无刷电机
有刷电机——螺旋桨
5.请写出无人机升力公式,并说明公式中各字母代表的含义。
答:升力公式:L=21ρV2SC;L: 升力;ρ: 飞机所在位置的空气密度;V: 飞机相对于气流的速度,即空速;S: 飞机的横截面积;CL: 升力系数,旋翼型、迎角、机翼平面形状的大小有关;
2026年4月23日新疆01
1.多旋翼无人机的动力系统由哪几部分组成?描述一下你参加教员飞行考试时使用的设备动力系统的参数?
答:动力电池-电子调速器-动力电机-螺旋桨;
电池:6S 22000mAh 2P,放电倍率15C,续航10-15分钟;
电调:60-80A 12S,支持FOC控制,带过流/过热保护;
电机:8120/100KV(125)、X8系列,单轴额定拉力4-6kg,功率800-1200W/轴;
螺旋桨:3011,2叶碳纤维;
2.请将下列经纬度换算成十进制,结果精确到小数点后四位:N37°41’16” E115°34’31″?
答:坐标转换十进制法:十进制度 = 度 + 分 ÷ 60 + 秒 ÷ 3600;十进制经纬度转换:先取整数部分为度,小数部分×60的整数为分,剩余小数×60为秒,N37°41’16” = 37 + 41 ÷ 60 + 16 ÷ 3600 = N37.6878°;E115°34’31” = 115 + 34 ÷ 60 + 31 ÷ 3600 = E115.5753°
3.cw和波束1555的含义?
答:cw是反波束,1555代表波束15英寸,螺距5.5英寸。
1英寸=2.54cm
4.螺旋桨产生升力的原理,并解释原理?
答:牛顿第三定律:
定体律:两个物体之间的作用力与反作用力,总是大小相等、方向相反,且作用在同一条直线上。
伯努利定理:
在理想流体(空气)的定常流动中,流体流速越快的位置,静压越小;流速越慢的位置,静压越大,总能量保持不变。
5.5000mah 6S 5C 20C 充电电流,放电电流,存储电压,截止电压,满电电压?
答:充电电流:电池容量5000mAh=5A,充电倍率5C,充电电流=5A×5=25A;
放电电流:放电倍率20C,放电电流=5A×20=100A;
存储电压:锂电池平均存储电压3.85V,6S串联总存储电压=3.85V×6=23.1V;
截止电压:锂电池平均截止电压3.0V,6S串联总截止电压=3.0V×6=21.6V;
满电电压:锂电池平均满电电压4.2V,6S串联总满电电压=4.2V×6=25.2V。
2026年4月10日河北03
1. 地面站考试科目应急操作程序
模拟位置信息丢失,仅参照地面站显示的航空器航向、姿态、高度和速度信息(不得参考视觉扩展设备或返航角显示信息),以姿态模式遥控操纵无人机应急返航。
学员应操纵无人机应急返航,于30秒内确定与直线归航航线角误差不超过±45°的归航向并进入返航航线不少于10秒;参照地面站显示的姿态、航迹、航向、高度等信息,小、中型无人机保持航线高度±5米以内超视距飞行;由实践考试委任代表恢复航迹或位置显示,学员在保障安全的条件下遥控无人机返回本场范围(小、中型无人机到达以起飞点为圆心不大于15米半径的区域)。
2. 接收机的各个接口或针脚的名称(13个,通道14需标注出名称,7,8,9为单独引脚,此题1分) 答:1-6号:标准PWM舵机通道(每排3针:信号 / 电源 + / 地 -)
编号名称功能说明[1]CH1 通道1(副翼 / Aileron)多旋翼 / 固定翼核心控制通道,对应遥控器右摇杆左右(横滚)[2]CH2 通道2(升降 / Elevator)对应遥控器右摇杆前后(俯仰),控制无人机抬头 / 低头[3]CH3 通道3(油门 / Throttle)对应遥控器左摇杆前后,控制电机转速与总推力[4]CH4 通道4(方向 / Rudder)对应遥控器左摇杆左右(偏航),控制无人机转向 / 自旋[5]CH5 通道5辅助通道,可用于云台、灯光、模式切换等扩展功能[6]CH6 通道6辅助通道,可用于起落架、相机快门等扩展功能7-9号:单独功能引脚
编号名称功能说明[7]PPM 信号输出端串行PPM信号输出,可单根线连接飞控,替代多路PWM接线[8]电源正极(VCC/+)接收机供电输入,支持4.8-10V DC,可接电池或电调BEC[9]电源负极(GND/-)接地引脚,与电源正极配对使用其他功能接口:10-13
编号名称功能说明[10]电池电压回传接口(B+)连接电池正极,用于实时回传电池电压到遥控器,实现低压报警[11]电池电压回传接口(B-)连接电池负极,与B+配对完成电压采样[12]LED 指示灯接口外接LED指示灯,用于显示接收机对频、信号、供电状态[13]2.4G 天线无线信号发射 / 接收天线,用于与遥控器通信,需远离金属部件以保证信号强度
3. X型气动布局四抽四旋翼无人机,以model-日本手为例俯视右上角螺旋桨为CCW无人机姿态做下列改变时,请标出各旋翼的加减速变化(加速请填”+”,减速请填”-“,本题1分,错填漏填不得分)
日本手 左上桨叶 右上桨叶 左下桨叶 右下桨叶
左手前推 – – + +
右手左推 – + – +
左手右推 – + + –
右手拉杆 – – – –
4. 写出下面图片的告警信息(3个)状态信息(5个以上)
答:告警信息(3个) ① DISARMED:未解锁(上锁状态),无人机无法启动电机,禁止起飞
② PreArm: RC not calibrated:预解锁检查失败,遥控器未校准,是飞控禁止解锁的核心告警
③ 姿态告警(地平线异常 / 姿态超限提示):界面地平线偏移,存在姿态异常告警(补充:部分版本将DISARMED、RC未校准、姿态异常列为核心告警)
状态信息(5个)
① 飞行模式:Stabilize(自稳模式):无人机处于增稳控制状态,适合新手操作
② 空速 AS 0.0:当前空速为0,无人机处于静止状态
③ 地速 GS 0.0:当前地速为0,无人机无水平移动
④ 时间 00:48:28:当前飞行计时(上电时长)为48分28秒
⑤ 方位 NE(北东方向):无人机机头朝向东北方位
⑥ 姿态角显示:俯仰、横滚姿态均为0°,无人机处于水平静止状态
⑦ 高度 / 垂直速度显示:垂直速度为0,无人机无升降运动
⑧ 0>0:飞控状态参数,代表当前无故障 / 无失控保护触发
5. 将坐标(E112.210000°、N23.705000°)转换成度分秒制。(本题1分,计算过程结果都要正确)
答:E112.21000° = E112°12′36″
过程:
度=112.21000° 取整数=112°
分=0.21°×60=12.6° 取整数=12′
秒=0.6°×60=36″ 取整数=36″
N23.705000° = 23°42′18″
过程:
度=23.705000° 取整数=23°
分=0.705000°×60=42.3° 取整数=42′
秒=0.3°×60=18″ 取整数=18″
2026年4月6日山西03
1.动力系统组成部分,考试使用无人机动力系统参数?
答:动力电池-电子调速器-动力电机-螺旋桨;
电池(动力来源):6S 22000mAh 2P,放电倍率15C,续航10-15分钟;
电调(ESC):60-80A 12S,支持F0C控制,带过流/过热保护;
电机(无刷电机为主):8120/100KV(12S)、X8系列,单轴额定拉力4-6kg,功率800-1200W/轴;
螺旋桨:3011,碳素材料;
2.请将下列经纬度换算成十进制,结果精确到小数点后四位。N37°41’16″ E115°34’31”(无运算过程不得分)?
答:N37°41ˊ16 = N37°+41ˊ/60+16″/3600 = N37.6878
E115°34ˊ31″= E115°+34ˊ/ 60+ 31”/ 3600 = E115.5753°
3.多旋翼产生升力的时候都使用了哪些原理?
答:牛顿第三定律和伯努利定理。
4.电调20A、2s-3s、BEC5V3A、Lipo参数什么意思?
答:参数含义:
20A:表示电调持续、稳定工作的电流为20A;
2-3S:表示电调可以使用由2-3节电心串联组成的锂聚合物电池,对应的电压范围通常7.4V-126V;
LiPo:即电调适配电池类型为锂聚合物电池;
BEC5.OV/3A:表示该电调具备内置的免电池电路(BEC)功能,能够将输入的电池电压转换为稳定5.OV的直流电,并提供3A的电流输出;
5.6S锂电池,5000mah,5C 20C求单片电芯的容量,最大充电电流,最大放电电流,存储电压,藏止电压,满电电压?
答:单片电芯的容量为5Ah;
充电电流=电池组容量×充电倍率=5Ah×5C=25A;
放电电流=电池组容量×放电倍率=5Ah×20C=100A;
单片电芯的存储电压在3.8V-3.85V;
存储电压=3.8V×6-3.85V×6=22.8V-23.1V;
截止电压=3.6V×6=21.6V;
满电电压=4.2V×6=25.2V;
2026年3月24日黑龙江01
1. 多旋翼无人机的动力系统由哪几部分组成?描述一下你参加教员飞行考试时使用的设备动力系统的参数?
动力系统组成:动力电池-电子调速器-动力电机-螺旋桨。
动力电池: 提供动力电能;
电子调速器:控制电机转速、直流转交流、过热保护,接收和反馈飞控信号,BEC输出;
动力电机:将电能转换为机械能,带动桨叶旋转提供升力来源;
螺旋桨:旋转为无人机提供升力。
动力电池:12S锂电池 容量22000mAh锂电池,放电倍率10C
电调参数:工作电压范围44.4V-50.4V, 工作电流范围80-120A。
动力电机:定子8120(电机定子铁芯外径、厚度(电机定子外壳定子尺寸)),KV值100-180rpm/V,额定电流60A。
螺旋桨: 2叶碳纤维,型号2809。
2. 请将下列经纬度换算成十进制,结果精确到小数点后四位 N37°41′16″ E115°34′31″
换算方法:
1. 度分秒转十进制度:十进制度 = 度 + 分÷60 + 秒÷3600
2. 十进制度转度分秒: 先取整数部分为度,
小数部分×60的整数为分,
剩余小数×60为秒
N37°41′16″ =37+ 41÷60 + 16÷3600 =N37.6878°
E115°34′31″ =115+ 34÷60 + 31÷3600 =E115.5753°
3. 什么是航空器,分为几类,都有什么?
答:在大气层内飞行的飞行器称为航空器;
航空器分为:轻于空气的航空器和重于空气的航空器
轻于空气的航空器包含:飞艇、气球;
重于空气的航空器:固定翼航空器(飞机、滑翔机)
旋翼航空器(直升机、自转旋翼机)
扑翼机
倾转旋翼机
4. 多旋翼上升都是使用了什么原理?
答:牛顿第三定律(作用力与反作用力) 伯努利定理;
5. 电池计算
2026年3月10日河北03
1. 多旋翼无人机的动力系统由哪几部分组成?描述一下你参加教员飞行考试时使用的设备动力系统的参数?
动力系统组成:动力电池-电子调速器-动力电机-螺旋桨。
动力电池: 提供动力电能;
电子调速器:控制电机转速、直流转交流、过热保护,接收和反馈飞控信号,BEC输出;
动力电机:将电能转换为机械能,带动桨叶旋转提供升力来源;
螺旋桨:旋转为无人机提供升力。
动力电池:12S锂电池 容量22000mAh锂电池,放电倍率10C
电调参数:工作电压范围44.4V-50.4V, 工作电流范围80-120A。
动力电机:定子8120(电机定子铁芯外径、厚度(电机定子外壳定子尺寸)),KV值100-180rpm/V,额定电流60A。
螺旋桨: 2叶碳纤维,型号2809。
2. 请将下列经纬度换算成十进制,结果精确到小数点后四位 N37°41′16″ E115°34′31″
换算方法:1. 度分秒转十进制度:十进制度 = 度 + 分÷60 + 秒÷3600
2. 十进制度转度分秒: 先取整数部分为度,小数部分×60的整数为分,剩余小数×60为秒
N37°41′16″ =37+ 41÷60 + 16÷3600 =N37.6878°
E115°34′31″ =115+ 34÷60 + 31÷3600 =E115.5753°
3. 什么是无人机的螺距?多旋翼无人机使用的桨叶大多为定距螺旋桨还是变距螺旋桨?螺距的单位是?
螺距是指螺旋桨旋转一周所前进或上升的距离。
多旋翼无人机使用的桨叶大多为定距螺旋桨。 螺距的单位是英寸。变距螺旋桨
桨叶角度能变,起飞、巡航、降落自动调角度
多用在直升机、固定翼上
4. 解释一下,什么是多旋翼无人机的轴距?
轴距:无人机的轴距是指对角线两个螺旋桨中心的距离
(或多旋翼无人机中对角线上的两个电机轴心之间的距离)
通常以毫米为单位,它直接影响无人机的螺旋桨尺寸和载重能力。
5.某锂聚合物电池,参数如下:单片电芯容量5000mAh,串联4S,充电倍率10C,放电倍率25C。
单片电芯标准容量:
公式:单片容量 = 标称容量
计算:5000mAh = 5000mAh
最大充电电流:
公式:充电电流 = 容量 × 充电倍率
计算:5000mAh × 10C = 50A (不能超过)
存储电压:
公式:存储电压 = 单片存储电压 × 串联数
计算:3.85V × 4S = 15.4V(厂家规定休眠电压 安全 寿命长)
满电电压:
公式:满电电压 = 单片满电电压 × 串联数
计算:4.2V × 4S = 16.8V
放电截止电压:
公式:截止电压 = 单片截止电压 × 串联数
计算:3.6V × 4S = 14.4V(不行报废 就停飞)
最大放电电流:
公式:放电电流 = 容量 × 放电倍率
计算:5000mAh × 25C = 125A
2026年2月28日安徽01
1外界突然的风速会如何影响气压高度计?
2 解释一下异形弯度和高度
3 最后一道计算题电池让求了六种东西 每种必须有计算结果和公式
4 还有一个经纬度,两种经纬度小数点后要留四位
5.轴距定义
2026年1月12日山东05
1.某两型电机参数如下(1)8308KV180、(2)2820KV550解释一下两型各项参数的含义,并指出哪一种适合驱动低速大桨叶,为什么?
答:(1)83:代表电机定子线圈直径83mm;
08:代表电机定子线圈高度8mm;
180KV:代表电压每增加1V,电机空载状态下转速增加180转/分钟;
(2)28:代表电机定子线圈直径28mm;
20:代表电机定子线圈高度20mm;
550KV:代表电压每增加1V,电机在空载状态下转速增加 550转/分钟;
第1种适合驱动低速大桨叶,因为该种电机属粗扁型电机扭矩大,转速低。
2.请将下列经纬度换算成十进制,精确到小数点后四位N31°53´32.91″;E117°27´22.23″(无运算过程不得分)
答:N31°53´32.91″=N31°+53’÷60+32.91″÷3600
=N31.892475°
E117°27´22.23″=E117°+27’÷60+22.23″÷3600
=E117.456175
3.轴距的定义?
答:无人机的轴距是指对角线两个螺旋桨中心的距离;通常以毫米为单位,它直接影响无人机的螺旋桨尺寸和载重能力。
4.前行桨叶和后行桨叶的定义?
答: 前行桨叶是指飞行器飞行时桨叶转动方向相对于气流迎风的这部分桨叶;
后行桨叶是指飞行器飞行时桨叶转动方向相对于气流顺风的这部分桨叶。
5.某锂聚合物电池参数如下,10000mah6S最大充电电流2C最大放电电流 20C,该电池能否被带上飞机为什么?(写出运算结果,没有运算结果或运算结果不正确不得分)
答:额定能量=额定电压×电池组容量=(6×3.7V)×10Ah=222Wh
不能带上飞机,因为民航规定严禁携带额定能量超过160Wh。
2026年1月8日吉林01
1.IMU,动力电池,遥控器接收机,无刷电调,有刷电机,PMU,GPS,指南针,螺旋桨,空速计(根据自己所考机型连线)?
答:PMU— 动力电池— 无刷电调—控器接收机
有刷电机—螺旋桨
IMU,GPs,指南针,空速计,因为没有飞控都连接不了。
2.大气压的定义和数值?
答:大气压的定义:是指地球表面的空气因受到重力作用而产压强。标准海平面的大气压为1013.25百帕;温度15摄氏度:密度为1.225kg/立方米。
3.多旋翼飞行器视距内,超视距操控员,教员的考试标准?
答:多旋翼飞行器视距内,超视距操控员的考试标准:依据航空器性能确定标准航线单个圆直径(小,中型:12米),航空器水平位移误差不超过正负2米,垂直位移误差不超过正负1米,航空器位移无卡顿,航向与标准航线切线夹角不超过30度。
多旋翼飞行器教员的考试标准:依据航空器性能确定标准航线单个阅直径(小,中型:12米),航空器水平位移误差不超过正负2米,垂直位移误差不超过正负1米,航空器位移无卡顿,航向与标准航线切线火角不超过25度。
4.有一个72MHz和2.4GHz频段的遥控器,遥控器与无人机之间有-片树林,且发射频率一致,无外部频率干扰,应选用哪一频段的遥控器,请解释原因?
答:应选72MHz;
原因:72MHz属于高频超短波,相对于2.4GHz频率低,波长长,绕射能力强,能绕过较大障碍物,但穿透能力弱;
2.4GHz属于超高频厘米波,相对于72MHz频率高,波长短,绕射能力弱,不过穿透能力较强,能穿透墙壁等障碍物,但穿透过程中信号会有衰减。
5.1555桨叶的含义?螺距的定义?
答:螺旋桨:15 代表螺旋桨直径是38.1cm;(15 英寸)
55 代表螺旋桨螺距是13.97cm;(5.5英寸)
1英寸等于2.54厘米1厘米等于10毫米
螺距是指螺旋奖旋转一周所前进或上升的距离;
2026年1月21日山西01
1.解释YAW.ROLL、PITCH 的含义?
答:YAW:代表偏航方向感度
ROLL:代表滚转方向感度
PTCH:代表俯仰方向感度
2.小型执照操作中型无人驾驶航空器的处罚?
答:超出操控员执照载明范围操控民用无人驾驶航空器飞行的,由民用航空管理部门处2000元以上2万元以下的罚款,并处暂扣操控员执照6个月至12个月;情节严重的,吊销其操控员执照,2年内不受理其操控员执照申请。
3.计算题6s2p10000mah锂聚合物电池,从满电状态下飞行,飞至电池电量剩20%的时候降落,四旋翼,每个旋翼的功率是111W求飞行时间?
答:飞行时间 =所耗能量÷四旋翼总功率=(标准能量x所耗比例)÷(电机数x单个电机功率)
=[10Ahx(3.7Vx6))x(1-20%)】/(4x111W)=0.4h=24min
4.实践飞行科目通用条件是什么?
答:实践飞行科目通用条件:无危险动作与姿态,操作柔和,航空器部件完好。
5.LIPO、LIFEPO4、NI-MH是什么 标准压多少?截止电压多少?
电池 名称 标准电压 截止电压
LIPO 锂聚合物电池 3.7V 3.6V
LiFePo4 磷酸铁锂电池 3.2V 2.0V-2.5V
NI-MH 镍氢电池 1.2V 1.0V
2025年12月26日湖北01
![图片[1]-贺亮口试真题-更炽热无人机CAAC执照备考](https://caac.hotteruav.cn/wp-content/uploads/2026/03/image-5.png)





暂无评论内容