
2026年1月26日湖南02
1. 三轴六桨叶无人机,是否具备动力冗余?单一动力失效,是否能保持稳定?
答:三轴六桨(每轴双桨共轴反桨)无人机具备基础动力冗余,但单一动力轴失效时,无法保持稳定悬停/飞行,仅能实现短暂姿态维持以应急迫降,核心原因是三轴构型的动力布局先天不具备全向动力补偿的几何条件。
拓展:核心结论
三轴六桨的冗余仅体现在单轴内双桨的桨叶/电机备份(单轴一个电机故障,另一电机可短时承担该轴动力),而非轴级动力冗余;任意一个动力轴完全失效后,三轴布局失去动力平衡,飞控无法通过剩余两轴的动力调节抵消偏航/滚转力矩,最终会姿态失控,仅能依靠飞控算法做降速、减扭的应急处理,降低坠机损毁程度。
关键原因:三轴构型的动力布局限制
无人机动力冗余的核心是失效后剩余动力能形成对称的力矩平衡,四轴/六轴(正六边)是对称布局,单轴失效后剩余轴可通过增扭补偿,但三轴(正三角)是最小对称构型,先天存在几何缺陷:
① 三轴六桨的三个动力轴呈120°对称分布,每个轴提供的升力和反扭力矩是三角平衡的核心;
② 单一轴失效后,剩余两轴的升力仅能覆盖整机50%~60%的额定升力,且无法形成对称的反扭力矩,会产生持续的偏航/滚转趋势;
③ 即使每轴双桨能保证单轴动力不丢失,只要轴级出现失效,平衡体系直接崩塌,飞控无调节空间。
简单来说,三轴六桨的“六桨”是单轴的备份,而非整机的动力冗余,仅能解决单轴内的部件故障,无法应对轴级的动力失效,这是三轴构型的先天设计局限。
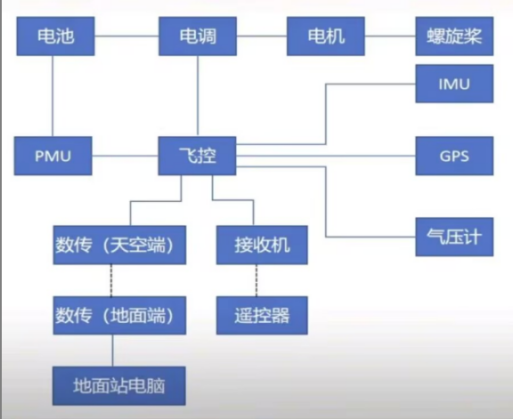
2. 写出至少三种数据上下行的传输方式或设备名称?
答:
– 遥控器:用于发送飞行控制指令,如起飞、降落和转向等操作。通常工作在特定的通信频段,如840.5-845MHz,确保指令准确无误地传输到无人机。
– 数据链系统:分为上行数据链和下行数据链。上行数据链负责将遥控指令从地面站传输到无人机,下行数据链则将无人机的状态信息和采集的数据传回地面站。普通无人机多使用定制视距数据链,而中高空、长航时无人机则结合视距和超视距卫通数据链。
– 5G通信模块:提供高速、低延迟的通信支持,适用于需要实时高清视频传输或复杂控制指令的场景。5G网络的大带宽特性能够满足无人机对大量数据传输的需求。
– 自动飞行控制系统:接收上行链路的飞行控制指令,并根据预设程序或实时指令控制无人机的飞行姿态和路径。同时,它也负责收集无人机的飞行状态信息,通过下行链路传回地面站。
3. 某品牌非高压版1ipo电池上标有22.2V,12000mah,最大充电倍率5C,最大放电倍率10C,放电到全部电量的20%截止,使用10A电流充电,在不计能量损耗的情况下,理论多少分钟充满?
答:充电时间=所充容量÷充电电流=[12Ah×(1-20%)]÷10A=0.96h=57.6min
4. 多旋翼无人机使用遥控器不能解锁造成的原因有哪些?(CDEF)
– A、电机转向不正确;
原因:A电机转向不正确:解锁后电机能转动但转向错误,会导致无人机无法悬停、直接偏航/翻滚,不影响解锁动作本身
– B、桨叶安装不正确;
原因:B桨叶安装不正确(反装/未锁紧):解锁后螺旋桨无有效升力、甚至甩桨,飞控仍可正常接收解锁指令完成解锁,仅飞行阶段出问题。
– C、油门通道设置不正确;
原因:C油门通道设置不正确:遥控器油门通道行程、反向设置错误,飞控检测不到油门杆在最低位的解锁初始条件,直接拒绝解锁指令。
– D、指南针未校准;
原因:D指南针未校准:飞控将指南针(磁罗盘)校准列为解锁前提,未校准/校准失败时,飞控判定系统存在航向风险,触发解锁保护。
– E、遥控器未校准;
原因:E遥控器未校准:遥控器摇杆行程、中立点未校准,飞控无法识别标准的解锁摇杆组合(如油门最低+方向杆打角),解锁指令无效
– F、IMU未校准;
原因:F IMU未校准:IMU(惯性测量单元)是无人机姿态核心,未校准/校准异常时,飞控无法感知自身姿态,为避免失控,禁止解锁。
5. 多旋翼飞机试飞中,机体发生激荡,应该如何调整PID当中的哪一个主要参数(是增加还是减少这个参数)?
答:飞机晃动厉害,优先调P(减小比例);若晃动持续不收敛,增大D(微分)。
核心是降低系统增益(P)或增加阻尼(D),恢复稳定性。





暂无评论内容