
2026年3月26日湖南02
1. 多旋翼的螺旋桨和什么类型航空器的螺旋桨相似?为什么各半径位置线速度和迎角不一样?
答:多旋翼的螺旋桨是定距螺旋桨,和固定翼飞机的螺旋桨更相似;
线速度不一样是因为线速度等于角速度乘半径,螺旋桨各处的角速度是一样的,所以越靠近桨毂处的线速度越小,越远离桨毂处的线速度越大。迎角不一样是为了保证螺旋桨各点处的升力处处相等。
2. 适飞空域高度是多少米,小型中型有没有适飞空域?
适飞空域真高不超过120米;
适飞空域:管制空域以外的空域为微型、轻型、小型无人驾驶航空器的适飞空域;所以,小型无人驾驶航空器有适飞空域;中型无人驾驶航空器没有适飞空域
3.电调 80A、6s-12s、BEC5v参数什么意思?(写错漏写不给分)
答:80A:表示电调持续、稳定工作的电流为80A;
6-12S:表示电调可以使用由6-12节电芯串联组成的锂聚合物电池,对应的电压范围通常22.2V-50.4V(1S-3.7V/4.2V);
– BEC5V:表示该电调具备内置的免电池电路(BEC)功能,能够将输入的电池电压转换为稳定的5V直流电;
4. 6s1p 16000mah 最大放电25C 充电5C 使用15分钟后降落电池只剩20%求八旋翼单个电机平均放电电流
电池容量:16000mAh = 16Ah
飞行时间:15分钟 = 0.25h
实际用电量:100% – 20% = 80%
总放电电流:16×0.8÷0.25 = 51.2A
单个电机电流:51.2÷8 = 6.4A
5.解释海拔高度,真实高度,相对高度?
答:解释相对,海拔,真实高度的含义并举例出一个传感器?
海拔高度:也叫绝对高度,是指飞行器飞行的水平面到平均海平面(大地水准面)的垂直距离。
测量传感器:GPS (卫星定位获取绝对海拔)
真实高度:是指飞行器距离其正下方地面的实际垂直高度,也叫离地高度。
测量传感器:激光测距传感器(或超声波传感器)
相对高度:是指飞行器相对于起飞点或某一指定水平面的垂直高度。
测量传感器:气压高度计(通过气压变化计算与起飞点的高度差)
2026年1月21日山东04
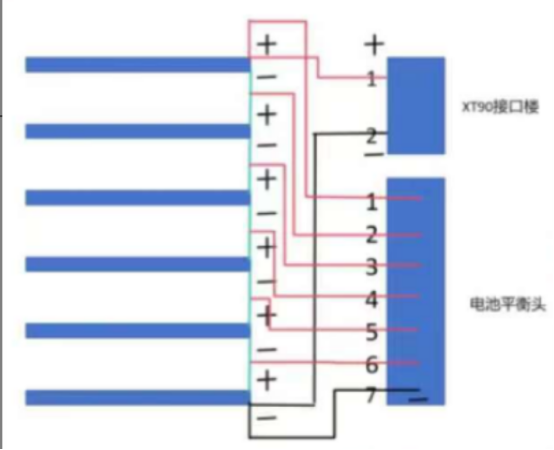
1. 无人机锂电池为什么要使用平衡头充电?(答两点)
答:①能监测每节电芯的电压,实现电芯间电压平衡;
②防止过充或电压不均导致电池损坏、确保电池安全和寿命。
2. 小型、中型多旋翼视距内实践飞行的考试误差?
一、视距内运行实践飞行考试科目要求
多旋翼级别视距内运行实践飞行考试科目可使用导航辅助模式(飞控内、外回路均参与控制,即飞行姿态辅助与位置修正辅助功能都使用),除不满足通用要求外,考试申请人可有三次机会完成以下科目内容。
考核项目 考核要求 通用要求
1 起飞 油门操纵均匀,姿态正常 无危险动作与姿态,操作柔和,航空器部件完好
2 悬停 水平位移不超过±2米,垂直位移不超过±1米
3 慢速水平偏转360° 水平位移误差不超过±2米,垂直位移误差不超过±1米,方向偏转无卡顿,项目考核时间为5至30秒内
4 水平8字 依据航空器性能确定标准航线单个圆直径(小、中型:12米),航空器水平位移误差不超过±2米,垂直位移误差不超过±1米,航空器位移无卡顿,航向与标准航线切线夹角不超过30°
5 定点降落 到达降落点后匀速下降,平稳降落
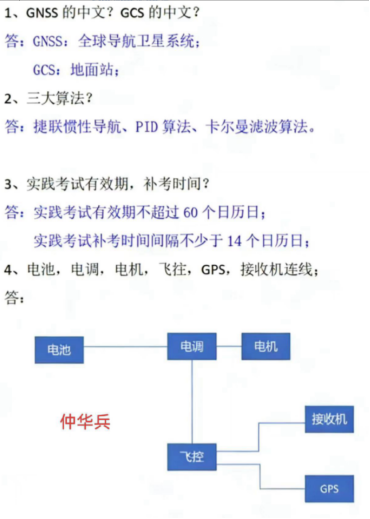
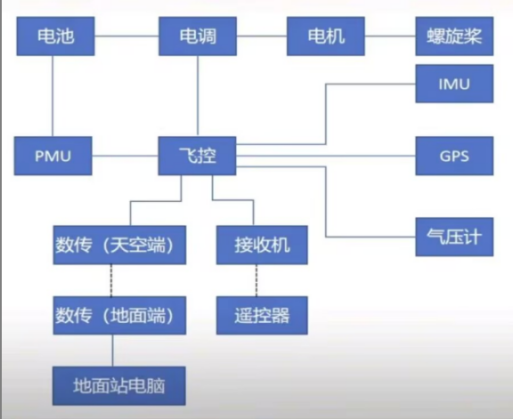
3. 连线题:动力电池、电调、动力电机、飞控、螺旋桨、接收机、PMU、RTK、空速计(只有固定翼有,且连飞控)
– 电池 → PMU
– 电池 → 电调
– 电调 → 电机
– 电机 → 螺旋桨
– PMU → 飞控
– 飞控 → 数传电台、GPS、接收机
4. 电调80A/150A、3s-6s、Lipo、BEC 5.2-8.0V/10A、HV参数什么意思?(写错漏写不给分)
答:- 80A/150A, Lipo:表示电调持续、稳定工作电流80A/能够承受的瞬时最大电流150A;适用于锂聚合物电池(Lipo)供电的设备。
– 3S-6S:表示电调可以使用由3-6节电芯串联组成的锂聚合物电池,对应的电压范围通常为11.1V-22.2V(1S=3.7V)。
– BEC 5.2-8.0V/10A:表示该电调具备内置的免电池电路(BEC)功能,能够将输入的电池电压转换为稳定,直流电的范围5.2V到8.0V之间,并提供10A的电流输出。
– HV:表示该电调支持较高的输入电压,能够适应更高电压的电池配置,以满足高功率设备的需求。
5. 解释海拔高度、真实高度、相对高度?它们用什么传感器测量?(各写一个)
答:- 海拔高度:也叫绝对高度,即飞机飞行水平面到海平面(大地水准面)的垂直距离;使用GPS测量。
– 真实高度:是指飞机距离正下方地面的实际垂直高度;使用激光测距传感器、超声波传感器等测量。
– 相对高度:是指飞机到指定的水平面的垂直距离;使用气压传感器测量。
2026年1月20日山东04
1.写出地球南纬,北纬,东经,西经的范围值。
答:S:0-90° N:0-90° E:0-180° W:0-180°
2.计算题:现有无人机训练用动力电池,电池类型为LIHV。规格为6S 30000mah最大放电倍率25C充电倍率最大5C,两组串联,满电电压是多少?最大放电电流是多少?
答:电池组满电电压=单片满电电压×串联数=(4.35V×6) ×2=52.2V
最大放电电流=额定容量X最大放电倍率=30Ah×25C=750A
3.驾驶无人机去南极飞行的时候,哪个传感器会异常不能工作?此时传感器的读数为多少?(不考虑温度、大气、大气密度对飞行器的影响)
答:磁罗盘/指南针;180度或180度小范围摇摆。
4.什么是航行风?
答:空气相对于航空器的相对风(或运动速度),由气象风与航空器空速的矢量差计算得出。
5.教员理论补考间隔(不少于28个日历日);
实践补考间隔(不少于14个日历日);
首个实践考试从(首个项目综合问答)通过后开始计算;
2025年12月27日湖南03
姓名:__________ 身份证号:____________________培训机构: ____________
1. VCC、GND分别代表什么意思?
答:VCC代表电路的正极电源输入端,GND代表电源负极(接地端),是所有电流回路的公共路径。
2. 桨叶各部分线速度与什么参数有关?
答:线速度=角速度×桨叶半径,线速度与角速度和桨叶半径有关,角速度越大,线速度越大,桨叶半径越大,桨叶叶尖的线速度越大。
3. 应急反航的垂直误差是多少?
答:应急返航垂直误差±5米以内。
4. 遥控器怎么调飞机灵敏度?
答:D/R(大小舵,行程量),EXP曲线。
5. 锂聚合物高压电池单片满电电压是多少?
答:锂聚合物高压电池单片满电电压是4.35V。



暂无评论内容